


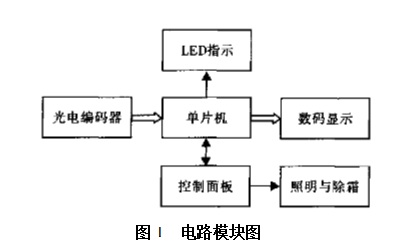
本文分析了基于AT89S51单片机的角度测量的硬件组成、电路设计原理。给出了主函数的工作流程和源代码。设计样机已通过多种环境实验的测试。角度测量仪是某控制系统中瞄准装置的关键部件。在以往的控制
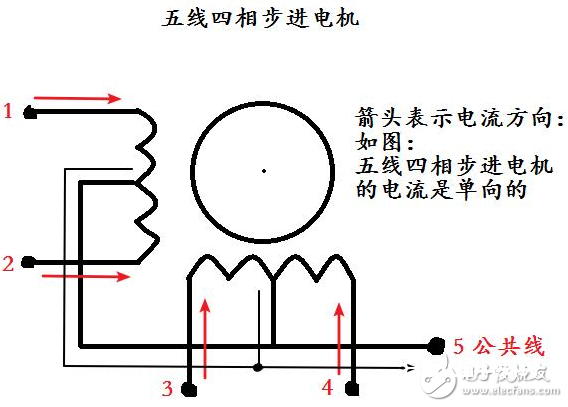
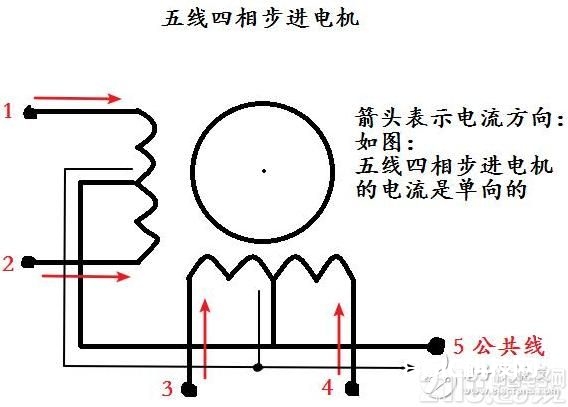
步进电动机是一种将电脉冲转化为角位移的执行机构,当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(这个角度叫做歩距角)。我们可以通过控制脉冲的个数来控制电机的角位移量,从
角度传感器IC中的片载线性化功能-从工业自动化和机器人到电子动力转向和电机位置检测等众多行业应用都需要监视同轴或偏轴布置的旋转轴的角度。针对这种应用的任何成功的角度测量系统设计都需要满足特定用户的
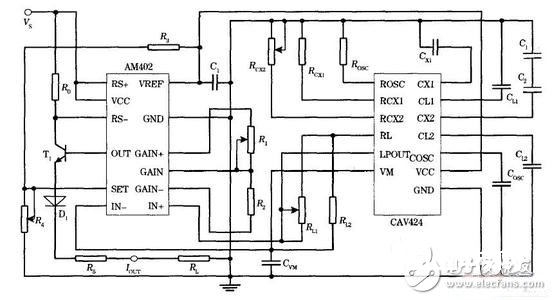
基于AM402的电流量输出电容式角度传感器的研究-设计了一种新型的电容式角度传感器,并利用电容式信号转换集成电路CAV424和电压一电流转换接口电路AM402,将电容传感器信号转化为4—20mA标准的


本文结合NCverilog,DesignCompile,Astro等ASIC设计所用到的EDA软件,从工艺独立性、系统的稳定性、复杂性的角度对比各种ASIC的设计方法,介绍了在编
三轴电动云台作为对主流航拍无人机提供稳定的支撑设备,其核心器件是旋转角度传感器,世强代理的Melexis公司推出的一款磁铁与霍尔芯片可任意放置的角度

