



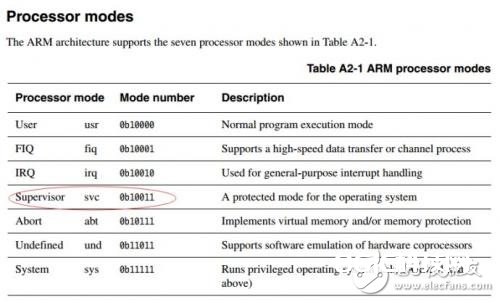
基于LPC1788的SSP1引脚的正确使用方法及注意事项-在学习过程中,发现一点容易被忽视而又很严重的问题—那就是关于SSP1的引脚使用P0[7]-P0[8]-P0[9]时,是W型IO配置。寄存器的第7位很容易被我们设置为0–但是手册上是要求必须为1,否则不能正常工作,这里我走了一点弯路。
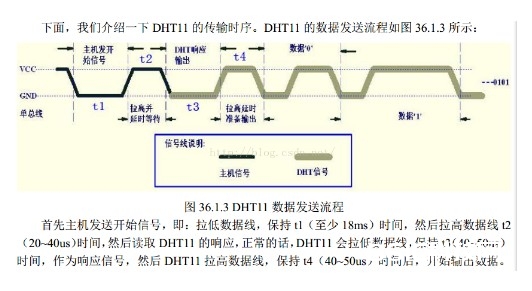
STM8单片机对温湿度传感器DHT11的驱动设计-二 贴上关键代码以及分析
//复位DHT11
voidDHT11_RST()
{
TIM4_CR1=0x00;//关闭定时器
TIM4_CNTR=0;//保证下次的第一个数据位的准确
DATA_SET;//ODR设置为1
DATA_OUT();//推挽输出模式,此时输出高电平
DATA_CLR;//此时处于主机输出模式,总线拉低
TIM2_Delayus(20000);//拉低20毫秒
DATA_SET;//释放总线
TIM2_Delayus(40);//释放总线以后等待40微秒DHT会发出响应信号
AVR单片机键盘程序设计-uchar key_temp;
PORTC|=0x07; //向PORTC.0–PORTC.2写入高电平
DDRC=0x00; //把PORTA设置为输入模式
key_temp=PINC&0x07; //读取PORTA.0–PORTA.2上的值并屏蔽其它位
/*****如果K0—K6按下,key_temp就为相应的键值,如果K7–K15按下,则读入PINC.0–PINC.2都为高电平,key_temp==7
然后PORTC.0–PORTC.2依次输出低电平,判断K7–K15那个键按下**********/
if(key_temp==7) //判断K7–K9是否按下
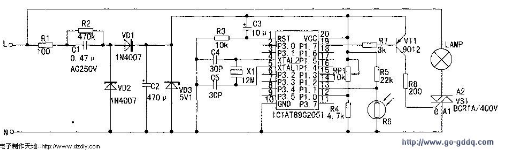
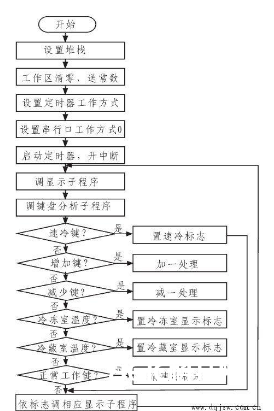
AT89C2051单片机智能控制器电路的设计-源程序介绍程序由主程序、定时中断子程序、延时子程序等模块组成。寄存器RO作计时单元,每过6分钟其计数值加1,存储器20H单元用来存储前一天天亮的时间,定时器TO用作定时中断子程序的计时。在智能控制器接通电源后,由于复位电路的作用,程序进入初始状态,这时将定时器TO设置为工作方式1,其定时时间设置为60ms。

如何使用代码清除STM32单片机上的PCROP-STM32PCROP专有代码读出保护,将某个区域设置为仅允许执行,可防止代码被非法读出与修改。ST网站提供了免费的PCROP参考代码,但是例程中仅仅提供了用代码设置PCROP。
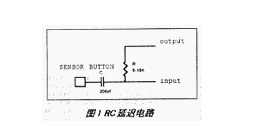
电容传感器按钮替代机电开关的设计-在图4硬件电路图中包含两个传感器按钮。其技巧是对于读传感器SB0:GP0设置为输入,GP1设置为输出;而对于读SB1:GP0设置为输出,GP1设置为输入。GP4,5连接至LED,指示传感器按钮的状态,PIC12C508其他引脚在此不讨论,它们可用做为SYNCRO输入和TRIAC DRIVER输出。
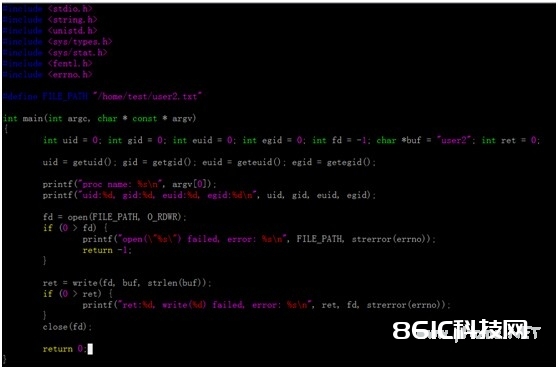
用户user1执行完需要user2才有权限的任务后,恢复进程的有效用户ID为user1的用户ID,等需要执行user2才有权限的任务时,又可以将进程的有效用户ID设置为

怎样才能让我发出的信件使用我的POP邮箱的地址,而不是 root@myhost.com 这样的地址?用 my_hdr 把你的 From: 设置为你想要的地址就行了。比如我是这样设置

