


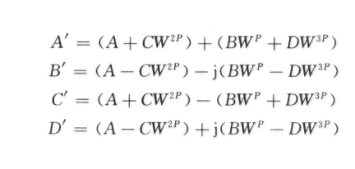
浅谈FFT算法原理 基于FPGA的FFT算法的硬件实现-在FFT算法中,数据的宽度通常都是固定的宽度。然而,在FFT的运算过程中,特别是乘法运算中,运算的结果将不可避免地带来误差。因此,为了保证结果的准确性,采用定点分析是非常必要的。
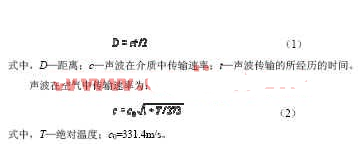
使用CPLD器件和晶体震荡器实现超声波测距系统的设计-以往利用超声波测量距离往往采用单片机单机系统(由单片机软件控制发射、接收及计数器的关停与启动),这种方法所带来的误差在厘米级。原因主要有:单片机计数器频率较低造成的误差;计数与发射信号由软件控制动作而产生的不同步;超声波传感器接收到信号与单片机检测到信号之间不同步等。本文给出一种以CPLD为控制核心的基于超声波测距原理的测量方法。经过制版测试,所得结果提高到毫米级,而且电路原理较为简单。
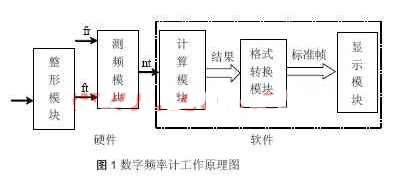
基于Xilinx XC95144和单片机实现数字频率计的设计-本文提出的基于CPLD和单片机相结合的设计方案不仅能较好地解决误差问题,误差仅小于等于 0.1HZ,同时还通过对软硬件界面的科学划分,在保证性能的基础上,尽最大可能地简化了硬件设计的难度。该方法原理图如图1所示。其中测频模块采用CPLD(Xilinx XC95144)设计完成,其余功能主要由单片机来实现。完成的功能如下:


压力传感器无法避免的四个误差-压力传感器是使用最为广泛的一种传感器。传统的压力传感器以机械结构型的器件为主,以弹性元件的形变指示压力,但这种结构尺寸大、质量重,不能提供电学输出。

如何使用CO2传感器来监测空气中二氧化碳的含量-当二氧化碳CO2浓度水平为1000 ppm时,大多数CO2传感器制造商提供的初始精度在100±50 ppm之间。如果将室内二氧化碳CO2含量设置为低于800 ppm且传感器误差为80 ppm,则偏差可能会导致误报。如果二氧化碳的二氧化碳含量过低,则会限制新鲜空气的量。

位移传感器出现数据跳动的具体原因分析-首先,这种情况将需要检查连接线的绝缘不是损坏的现象,而与外壳的机器是一个经常接触,并导致短路。其次,对中性要求直线位移传感器的安装是非常好的,但并行度可以允许有一个+0.5mm的误差,角度可以允许有±12误差度。

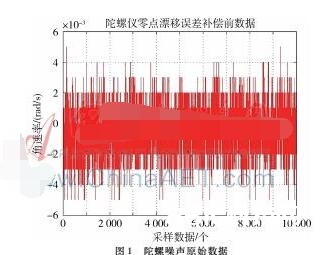
基于DSP的MEMS陀螺误差建模与滤波方法分析-随着微机电和惯性技术的发展,MEMS惯性器件技术越来越成熟,MEMS陀螺以其性能高、尺寸小、能耗低、可靠性高、重量轻、价格低等优点,在低成本姿态测量系统中的应用越来越广泛。
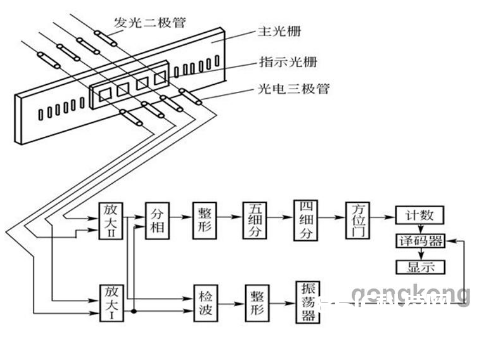
光栅式万能测长仪的工作原理解析-光栅是在一块长条形的光学玻璃上密集等间距平行的刻线,刻线密度为 10~100线/毫米。由光栅形成的叠栅条纹具有光学放大作用和误差平均效应,因而能提高测量精度。
