


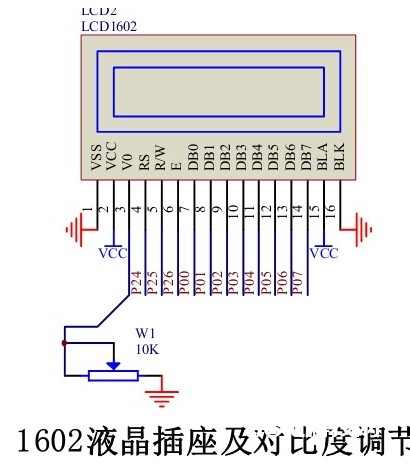
单片机对1602液晶的驱动-液晶的基本操作时序:
1.1读状态:输入:RS = L,RW =H,E = H输出D0~D7
1.2写指令:输入:RS = L,RW = L,D0~D7指令码,E = 高脉冲,输出:无;
RS是数据命令选择端(H/L);
1.3读数据:输入RS= H,RW=H,E=H
1.4写指令:输出,RS = L,RW = L,D0~D7=数据,E=高脉冲
51单片机控制舵机旋转的设计-#include“reg52.h”
#include //包含NOP空指令函数_nop_();
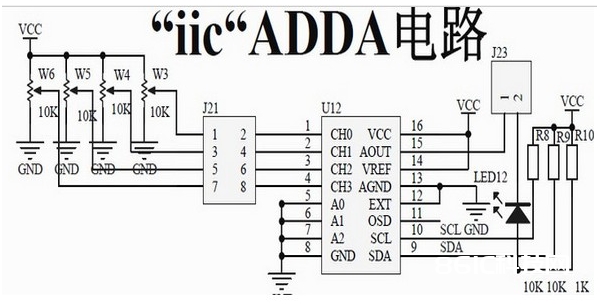
#define AddWr 0x90 //写数据地址
#define AddRd 0x91 //读数据地址
sbit Sda=P1^2; //定义总线连接端口
sbit Scl=P1^1;
sbit control_signal=P1^5;
data unsigned int Display[8];//定义临时存放数码管数值

51单片机对LCD1602液晶的驱动设计-1、1602液晶读写时序
(1)、读状态
RS=L,R/W=H,E=H。(判断忙完毕后释放总线)
(2)、读数据
RS=H,R/W=H,E=H。
(3)、写指令
RS=L,R/W=L,D0~D7=指令码,E=高脉冲
(4)、写数据
RS=H,R/W=L,D0~D7=数据,E=高脉冲

单片机对1602液晶的驱动设计-1.1读状态:输入:RS = L,RW =H,E = H输出D0~D7
1.2写指令:输入:RS = L,RW = L,D0~D7指令码,E = 高脉冲,输出:无;
RS是数据命令选择端(H/L);
1.3读数据:输入RS= H,RW=H,E=H
1.4写指令:输出,RS = L,RW = L,D0~D7=数据,E=高脉冲
注意:对控制器每次进行读写操作之前,都必须进行读写检测,确保STA7为0,可以用简单的延时来代替

催化燃烧式气体传感器的热效应原理及优缺点分析-不同可燃气体的燃烧值不同,传感器测量的是燃烧引起的电阻变化而不是浓度的变化,故此不同可燃气体尽管在相同的浓度下读数也可能不同。
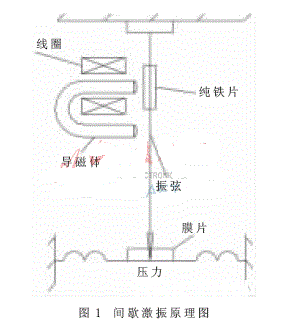
振弦式传感器的激振技术和测频读数技术解析-振弦式传感器是目前应力、应变测量中较为先进的传感器之一。振弦式传感器的输出是频率信号,信号处理过程中无须进行A/D及D/A转换,因此,抗干扰能力强,信号传输距离远,而且对传输电缆要求低。另外,振弦式传感器还具有结构简单、精度高、寿命长等特点, 因而一直受到工程界的关注。
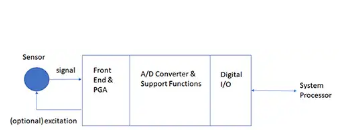
传感器IC的各种故障以及读数不准确的原因分析-根据传感器的类型,其引线的故障可能会立即表现为读数“偏离标度”。相反,某些故障模式会导致不准确但看起来合理的信号。此外,某些传感器(如 RTD)需要外部激励电流,而此电流必须在设定范围内才能提供有效读数。鉴于这些原因,可取的做法是:测试传感器与模拟前端之间信号路径的连续性,并检查信号是否保持在允许的最小和最大限值之间,但最好使用不受 ADC 潜在问题影响的模拟电路。
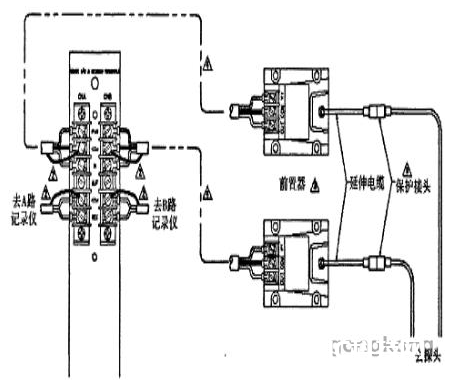
本特利3300系列传感器的校验过程解析-探头由通有高频信号的线圈构成,被测轴金属表面与探头相对位置变化时,形成的电涡流大小改变,使探头内高频信号能量损失大小变化,这个变化的信号通过前置器转化成与探头所测间隙的电压相对应的电压信号,该信号进往组件箱中的监测器,经监测器内部转换后以读数显示。
扫频激振原理及电路设计详解-随着现代电子读数仪技术、材料及生产工艺的发展,振弦式仪器技术也不断得以完善,成为新一代工程仪器的潮流,被广泛应用在建筑物基础、大坝、桥梁、公路、核电站的水泥外壳等需要对受力、位移、微裂缝的测量中,还可以作为电子秤、皮带秤、汽车秤等的关键传感器。为了准确测量应力、应变的变化,除了要研究振弦式传感器的材料特性外,还必须解决振弦传感器的激振和测频读数技术。为此,本文对振弦式传感器的激振技术和测频读数技术展开了研究,介绍了基于PIC16F873单片机内比较输出模式的多路振弦传感器的扫频激振技术。

雷尼绍RoLin™非接触式磁编码器系统,采用最先进的传感技术-RoLin读数头内部的电子元件细分率高达13位,并可进行故障监控。编码器符合RoHS标准,提供八种分辨率,直线应用分辨率从0.244 µm至125 µm,旋转应用分辨率从608至753 664 cpr,根据不同的分辨率,速度高达40 m/s。电子细分误差为±3.5 µm。
