



本站为您提供的双张检测超声波传感器UD18, 和上一代产品UM18相比,UD18检测距离更远,型号更齐全。它拥有可靠的物料分级功能,无论单张、双张、无物料均能检测。同时,UD18即插即用,可在传感器运行过程中选择、示教或改变高达4种灵敏度等级,安装距离亦灵活多变。

本站为您提供的东芝摄影新技术 一次拍摄、两种图像,近日,东芝成功开发出使用单反相机拍摄一次即可同时获取彩色图像和距离图像的摄影技术,通过全新镜头设计与图像处理技术的结合,实现了可与立体相机媲美的高精度距离检测。该技术已于2016年6月8日在日本横滨举办的第22届“SSII2016图像传感交流会”上正式发布。

本站为您提供的Vishay宣布推出新的探测距离可达1米的高灵敏度接近和环境光传感器—VCNL4100,Vishay Intertechnology, Inc.(NYSE 股市代号:VSH)宣布,光电子产品部发布新的探测距离可达1米的高灵敏度接近和环境光传感器—VCNL4100。Vishay Semiconductors VCNL4100采用Filtron™技术和小尺寸8mm x 3mm x 1.8mm表面贴装封装,将高功率红外发射器、接近和环境光的光探测器、信号处理IC和8位/16位ADC组合在一起。这颗三合一传感器具有中断功能,支持I2C总线通信接口,可用于智能家居、工业和办公设备。
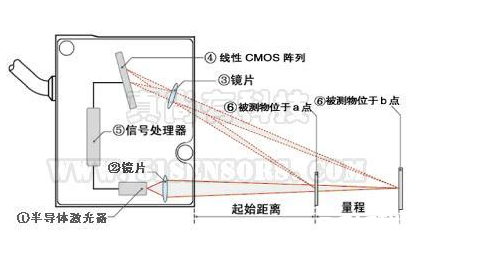
本站为您提供的激光位移传感器原理,激光位移传感器原理之激光三角测量法原理:
激光发射器通过镜头将可见红色激光射向被测物体表面,经物体反射的激光通过接收器镜头,被内部的CCD线性相机接收,根据不同的距离,CCD线性相机可以在不同的角度下“看见”这个光点。根据这个角度及已知的激光和相机之间的距离,数字信号处理器就能计算出传感器和被测物体之间的距离。

本站为您提供的激光测距传感器的分类与应用,激光测距传感器技术按照测程分为绝对距离测量法和微位移测量法。按照测距方法细分,绝对距离测距法主要脉冲式激光测距和相位式激光测距,微位移测量法主要有三角法激光测距和干涉法激光测距。
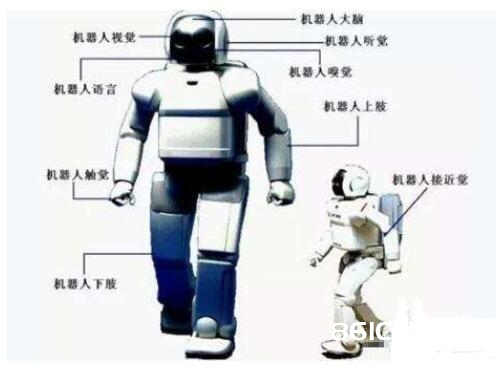
本站为您提供的机器人传感器常用的有哪几种,机器人常用传感器根据检测对象的不同可分为内部传感器和外部传感器。内部传感器主要用来检测机器人本身状态(如手臂间角度),多为检测位置和角度的传感器。外部传感器主要用来检测机器人所处环境(如是什么物体,离物体的距离有多远等)及状况(如抓取的物体是否滑落)的传感器。具体有物体识别传感器、物体探伤传感器、接近觉传感器、距离传感器、力觉传感器,听觉传感器等。

本站为您提供的接近开关传感器的选择原则,接近开关型号不同,感应距离不同,如一般轴径8mm的接近开关,感应距离在0.15-1.5mm,12mm的感应距离在0.3-3mm,18mm的感应距离在0.6-6mm,30mm的感应距离在1-10mm。

本站为您提供的接近开关距离有哪些?,我们具体看是什么类型的有接触式的有感应式的接触式的只有接触力达到一定程度才有作用。感应式是在一定的范围内可以检测到的。范围在一定程度上是可以调节的。参照说明书调节。接近开关的检测距离与具体型号有关,一般的检测距离在10毫米左右,如:NI25型的检测距离最大有15毫米,而NI35型的检测距离最大有25毫米。

本站为您提供的光电开关的分类及检测方法,对射式检测距槽型光电开关(9张)离远,可检测半透明物体的密度(透光度)。反射式的工作距离被限定在光束的交点附近,以避免背景影响。镜面反射式的反射距离较远,适宜作远距离检测,也可检测透明或半透明物体。

本站为您提供的PCB Layout爬电距离、电气间隙的确定,PCB Layout爬电距离、电气间隙的确定
爬电距离的确定: 首先需要确定绝缘的种类: 基本绝缘:一次电路与保护地 工作绝缘 ① :一次电路内部;二次电
