


针对智能汽车竞赛中的电磁组参赛要求,提出了两轮自平衡智能车系统的设计方案。主控芯片采用飞思卡尔公司的MC9S12XS128,选用加速度传感器检测车模的倾角,陀螺仪检测车模的角加速度;通过控制两个电机的
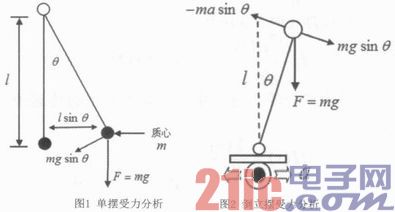
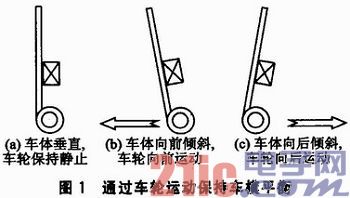
摘要:两轮自平衡智能车要求车模两轮驱动实现其直立行走。直立车的硬件设计和软件设计与四轮车相比更加复杂,在“飞思卡尔”杯全国大学生智能汽车竞赛中,直立车故障多,近一半的参赛队伍完
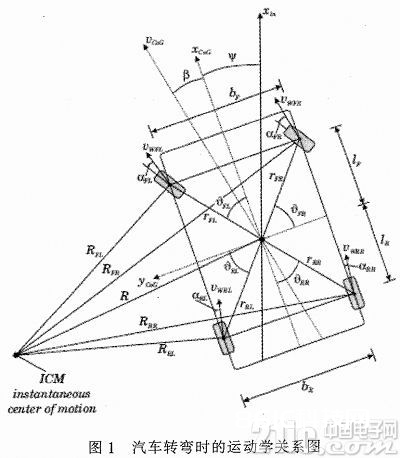
摘要:巡航控制是保证车辆安全行驶的基本功能之一,更是车辆自主行驶的关键技术。针对无人车的巡航控制问题,本文首先回顾和评述了前人的研究工作,然后选择了一款两轮驱动的无人车模型,考虑了安全车辆之间相对距离
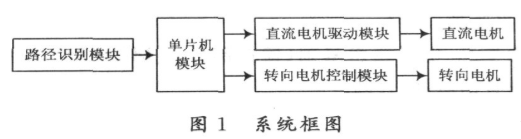
基于ATMEGAl6单片机和分级转向模块实现智能寻迹车模系统的设计-智能运输系统是未来交通运输系统发展的趋势,智能汽车在智能运输系统中扮演着十分重要的角色。作者提出智能寻迹车作为构建未来智能交通运输系统中重要部分,针对未来交通运输系统有导航线的环境命题假设下智能汽车的自主寻迹问题,提出一种基于视觉的智能寻迹车模设计方案,作为该假设问题的解决方案。
