




这个问题见了好几次,在.net下 Microsoft visual 2005->visual studio tools->visual studio 2005命令提示下输入aspnet_r

数模设计过程中要避免照搬经验和规则,但要彻底讲清这个问题,首先要明白数模干扰的机理,数字对模拟的影响可以分为以下两种情况:串扰和共阻抗耦合。1、串扰串扰一般是通过数字与模拟信号线间


由于很多人总问这个问题,所以这里做一个总结供大家参考。这里必须先说明,以下的步骤都是针对Linux系统的,并不面向WinCE。也许你会注意到,现在
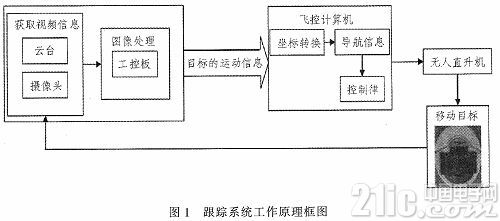
摘要:实现无人直升机对移动目标的跟踪是一个较难的技术,针对这个问题,本文基于计算机视觉对无人直升机移动目标跟踪技术进行了研究。首先,设计了无人直升机跟踪移动目标的总体方案;其次,提出了一种快速识别定位

单位增益稳定的运放在增益大于等于1的情况下是稳定的,增益更小的时候还正确吗?怎么办?这个问题在E2E论坛上隔段时间就出现。好吧,来个简洁的答案:反向衰减器稳定。你想知道为什么吗?关于这个问题有很多方法
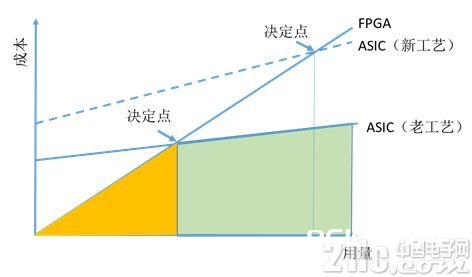
作为一个系统设计工程师,经常会遇到这个问题:是选用ASIC还是FPGA?让我们来看一看这两者有什么不同。所谓ASIC,是专用集成电路(Application Specific Integrated
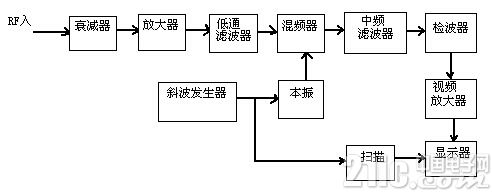
在测量一些CATV系统指标中,常常要用到频谱仪,为了使测量结果准确,在频谱仪的使用上常涉及到一个分辨带宽设置的问题。要弄清这个问题,得要知 道一些频谱仪的基本原理。图1是频谱仪的基本原理框图。图中的
