


如何用51单片机实现IIC通信-在之前的MCS-51系列单片机中内部没有IIC通信资源,所如果要想用51单片机实现IIC通信,就只能通过软件模拟其时序,这样也能实现IIC通信的功能。
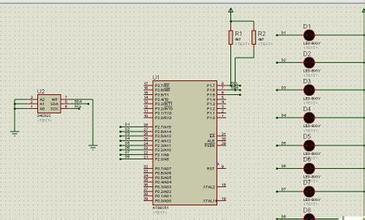
如何使用51单片机实现串口通信-51单片机的串口引脚为P3.0引脚与P3.1引脚,分别是RXD和TXD引脚。串口通信可以用于单片机和其它芯片通信或者单片机之间通信或者单片机与电脑通信。串口通信一般都是交叉连接。标准的串口有9个引脚,我们一般情况下,只用RXD TXD GND,剩下的引脚都是通信控制引脚,在以前用于控制电话机,现在已经基本上不用了。所以我们的51单片机上只保留了RXD和TXD。

单片机与PC之间串行通信设计-源程序:
#include
sbit button=P3^5;
void init_tx()
{
TMOD=0x20;
TH1=0xfd;
TL1=0xfd;
PCON=0x00;
SCON=0x40;
EA=1;
ES=1;
EX1=1;
TI=0;
EX1=1;
IT1=0;
TR1=1;
}

如何在STM32串口通信程序中使用printf发送数据-在STM32串口通信程序中使用printf发送数据,非常的方便。可在刚开始使用的时候总是遇到问题,常见的是硬件访真时无法进入main主函数,其实只要简单的配置一下就可以了。
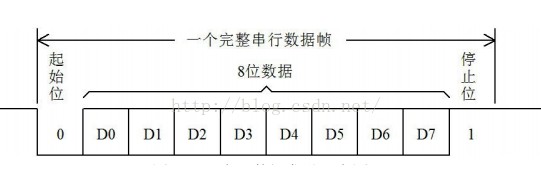
STC89C52单片机的UART串行通信设计-通信过程:在UART 通信的时候,一个字节是 8 位,规定当没有通信信号发生时,通信线路保持高电平,当要发送数据之前,先发一位 0 表示起始位,然后发送 8 位数据位,数据位是先低后高的顺序,数据位发完后再发一位 1 表示停止位。
STM8S的通用异步收发器UART的原理解析-STM8S的通用异步收发器(UART)主要特性:
● 全双工的,异步通信
● 可编程数据字长度(8位或9位)
● 可配置的停止位-支持1或2个停止位
一般的,我们使用串口通信主要是关心几点参数:波特率、停止位、奇偶校验位。
其次就是如何发送、如何接收数据,这里介绍的使用阻塞式发送数据、中断方式接收数据。
STM32单片机的can总线的配置-CAN_InitStructure.CAN_TTCM=DISABLE;//禁止时间触发通信模式
CAN_InitStructure.CAN_ABOM=DISABLE;
CAN_InitStructure.CAN_AWUM=DISABLE;
CAN_InitStructure.CAN_NART=DISABLE;//CAN报文只被发送1次,不管发送的结果如何(成功、出错或仲裁丢失)
CAN_InitStructure.CAN_RFLM=DISABLE;
CAN_InitStructure.CAN_TXFP=DISABLE;
CAN_InitStructure.CAN_Mode=CAN_Mode_Normal;
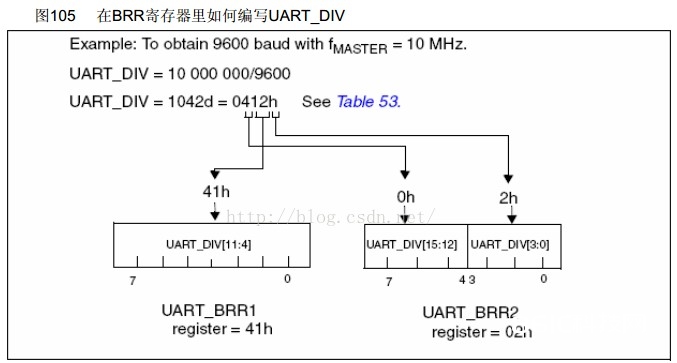
STM32F407的UART串口初始化-USART1和USART6接口能够速度高达10.5 Mbit / s的通信其他可用的接口通信高达5.25bit/s。USART1,USART2,USART3和USART6还提供硬件管理的CTS,RTS信号,智能卡的模式(ISO7816兼容)和类似的SPI通信能力。所有接口都可以通过DMA控制器。

PIC单片机虚拟串行通信设计-本实例完全建立在计算机软件的基础上,利用PROTEUS软件构建一个单片机系统,利用VB编写一个计算机控制软件和单片机系统串行通信,计算机上的控制软件可以发送一个值在0——999之间的数,在单片机系统上显示出来,单片机系统上也可输入一个相同值域的数并在计算机控制软件上显示出来。本实例主要是为了展示虚拟串行通信的仿真。
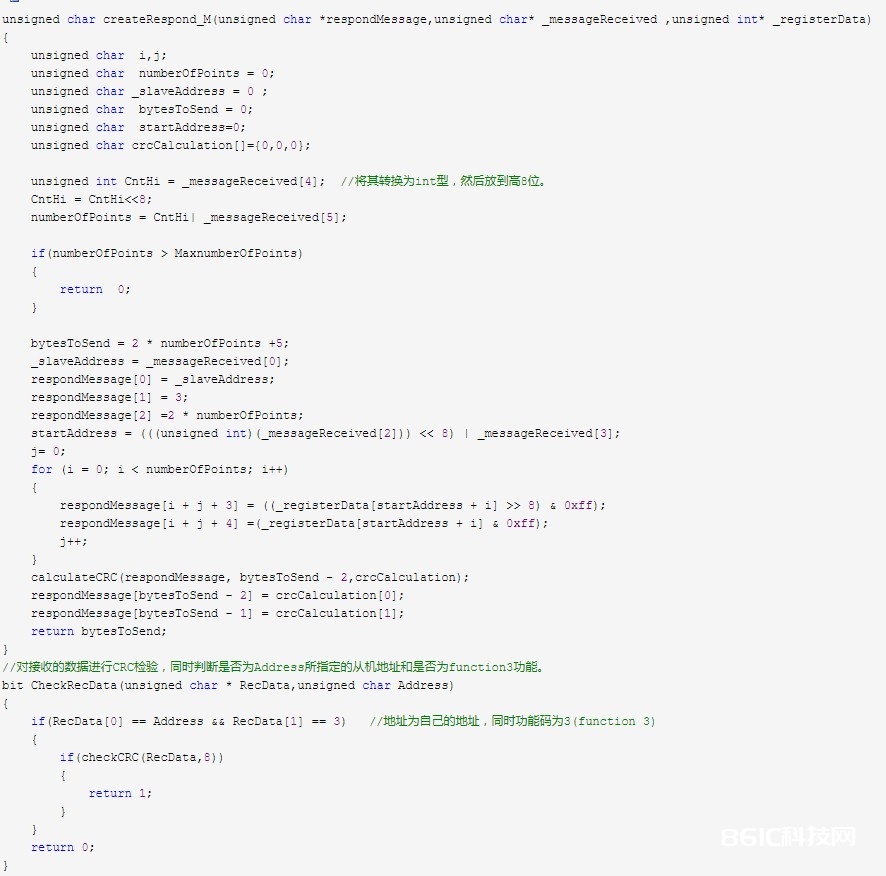
基于PC和单片机实现MODBUS RTU通信-最近研究了一下MODBUS通信,在STC12C5A60S2单片机上实现了MODBUS协议的部分功能,方便上位机从单片机系统上获取数据,比如由单片机获取的温度、湿度、或者控制信号的状态等。
