


基于模糊控制和QR码的精确定位方法设计详解-自动引导车(Automated Guided Vehicle,AGV)是现代物流行业的高效运输工具。但是,在AGV运行过程中,导航定位精度差,一直制约其在许多工业环境下的应用。提出一种最优偏差路径的AGV纠偏方法,可以实现5 mm范围内纠正,但是系统鲁棒性较差。采用了一种基于惯性导航和视觉里程计的定位算法,实现视觉辅助定位,克服惯性导航的不足,但是仍然无法实现后期AGV的位置修正;采用自定义定位标识符法,在地面铺设停车标识,系统识别停车标志符后,即根据直线运动公式计算AGV停车距离,直至距离为0,但后期缺少视觉信息反馈,不具备停车纠偏能力。
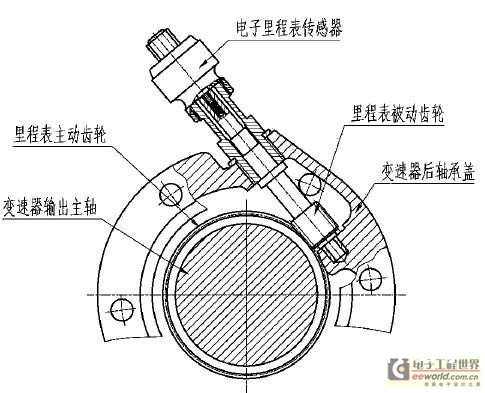
车速里程表是由指示汽车行驶速度的车速表和记录汽车所行驶过距离的里程计组成的。目前有机械式和电子式两种。一、车速里程表的信号装置(一)机械式车速里程表传统的车速里程表是机械式的,他的驱动轴另一端制成方头
