


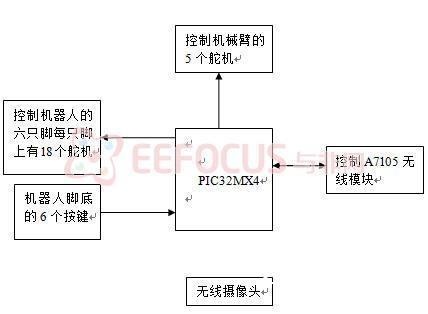
本设计通过以MIPS构架的PIC32单片机实现对仿生六足机器人基本步态控制,使机器人可按照典型步态协调灵活运动。该六足机器人前进一步的最大距离是8CM 。一次拐弯的最大角度为30度。机械臂夹起来的重物

1、在工频运行时,发电制动的意义是:1)举例说,起重异步电机,在吊重下落时,中午拖动异步电机发电运行,这时异步电机处于发电状态,发电电流就是制动电流,这时重物的重力势能转换为电能回馈电网;
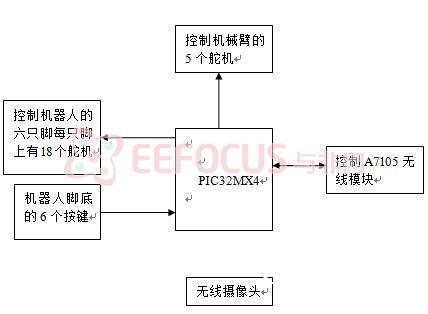
本设计通过以MIPS构架的PIC32单片机实现对仿生六足机器人基本步态控制,使机器人可按照典型步态协调灵活运动。该六足机器人前进一步的最大距离是8CM 。一次拐弯的最大角度为30度。机械臂夹起来的重物
