


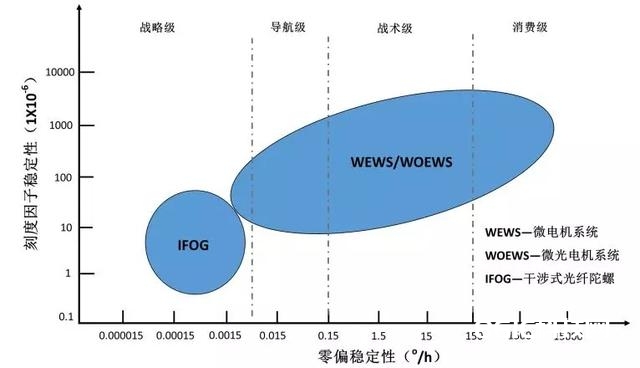
高精度MEMS陀螺仪或将取代光纤陀螺仪-近几年来,MEMS惯性传感器发展迅速,精度不断提高。虽然精度相比光纤陀螺、激光陀螺仍有很大差距,但是其价格低、体积小、重量轻,使MEMS惯性导航系统在惯性导航系统中发挥重要作用。
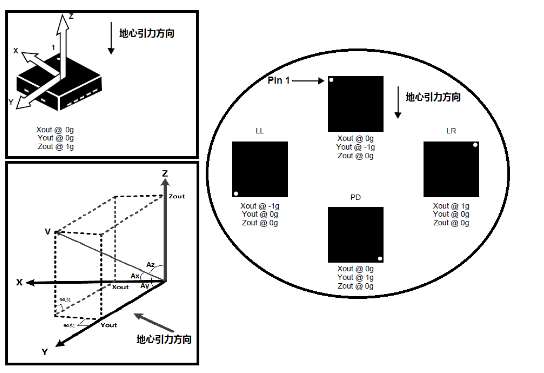
九轴传感器之加速度计是怎么回事-九轴姿态传感器,包括了加速度计、陀螺仪和磁力计,为“motion detect”提供了必需的传感数据。本篇主要讲述九轴姿态传感器中的加速度计部分。
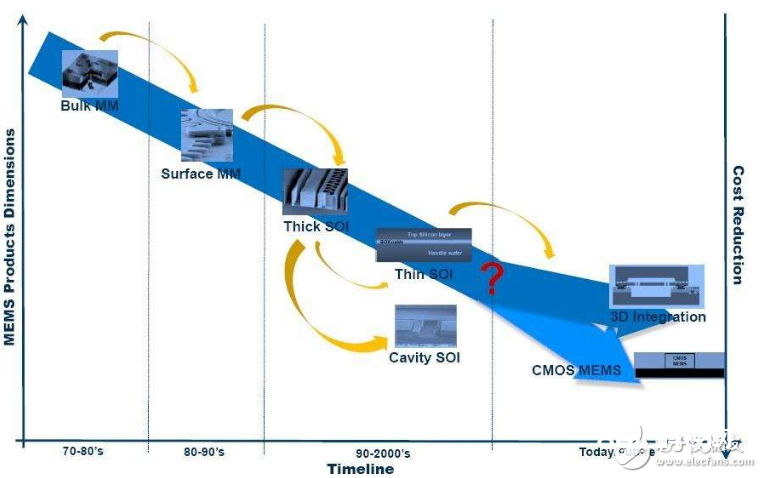
详解MEMS技术的发展历史进程-MEMS第一轮商业化浪潮始于20世纪70年代末80年代初,当时用大型蚀刻硅片结构和背蚀刻膜片制作压力传感器。由于薄硅片振动膜在压力下变形,会影响其表面的压敏电阻走线,这种变化可以把压力转换成电信号。后来的电路则包括电容感应移动质量加速计,用于触发汽车安全气囊和定位陀螺仪。 第二轮商业化出现于20世纪90年代,主要围绕着PC和信息技术的兴起。
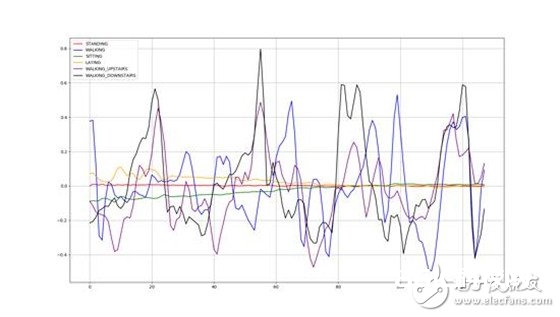
根据手机的传感器数据,用于预测用户的运动模式-本例的数据来源于UCI(即UC Irvine,加州大学欧文分校)。数据由年龄在19-48岁之间的30位志愿者,智能手机固定于他们的腰部,执行六项动作,即行走、上楼梯、下楼梯、坐、站立、躺下,同时在手机中存储传感器(加速度传感器和陀螺仪)的三维(XYZ轴)数据。传感器的频率被设置为50HZ(即每秒50次记录)。对于所输出传感器的维度数据,进行噪声过滤(Noise Filter),以2.56秒的固定窗口滑动,同时窗口之间包含50%的重叠,即每个窗口的数据维度是128(2.56*50)维,根据不同的运动类别,将数据进行标注。传感器含有三类:身体(Body)的加速度传感器、整体(Total)的加速度传感器、陀螺仪。
浅谈MEMS陀螺仪技术 MEMS是否取代光纤陀螺仪技术-MEMS陀螺仪也称电子式陀螺仪,就是一块芯片。 Iphone 4上的陀螺仪就是这种,主要作用是在GPS没有信号时,通过陀螺仪的作用仍然能够继续精确导航。
基于FPGA的模拟表头原理及设计-表头的主要功能是将Sagnac效应产生的光程差所引起的相位变化通过回路耦合器转换为光功率的变化,再通过探测器探测后以电信号的形式输出至调制解调电路中。数字闭环光纤陀螺仪系统结构见图1。从调制解调电路中采样来的原始参数值,经过模拟表头内数字信号处理,可将输入调制解调电路的实际表头信号还原出来。
ADIS16355芯片MEMS陀螺仪数据采集硬件设计-DIS16355惯性测量装置将三轴角速度感知与三轴加速度感知相结合,提供六自由度运动感知、嵌入式校准与传感器处理以及传感器-传感器交叉补偿,并大大提高信号稳定性(使用偏移稳定性为0.015 deg/sec),体积小于1立方英寸。ADIS16355是在整个温度范围内校准,具有卓越的偏压温度稳定性(0.005 deg/sec/°)。
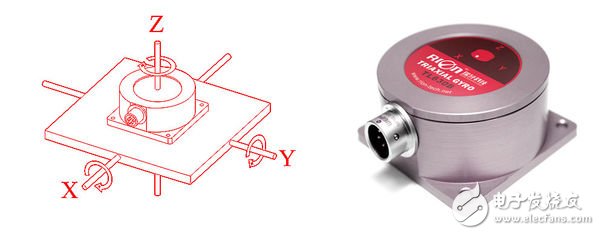
三轴陀螺仪有什么用_三轴陀螺仪的作用-三轴陀螺仪是惯性导航系统的核心敏感器件,其测量精度直接影响惯导系统的姿态解算的准确性。对于三轴陀螺仪来说,其测量结果的精度与构成三轴陀螺仪的各单轴陀螺仪的零偏误差、刻度系数误差、随机漂移误差以及各单轴陀螺仪敏感轴之间的不正交安装误差相关。相比于单轴传感器,三轴传感器的校准参数更多,校准过程更为复杂。目前,陀螺仪的标定通常采用位置标定和速率标定方法。 三轴陀螺仪的作用 三轴陀螺仪能同时测定6个方向的位置,
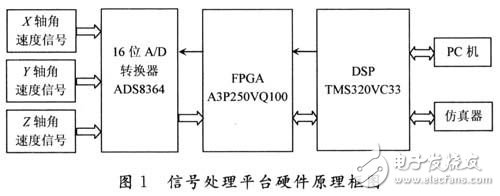
详解MEMS陀螺仪中DSP应用-MEMS陀螺仪信号的处理平台的硬件系统应该包括以下几个部分:DSP模块,数据采集模块,上位机通信模块和JTAG调试接口模块。数据采集模块由两部分组成:6路16位模/数转换器ADS8364和同步时序控制器FPGA(A3P250VQ100)。FPGA(A3P250VQ100)一方面是控制各个单元时序,另一方面是为了对A/D采集来的陀螺信号进行预处理。
一文读懂三轴陀螺仪工作原理和应用-三轴陀螺仪:同时测定6个方向的位置,移动轨迹,加速。 单轴的只能测量一个方向的量,也就是一个系统需要三个陀螺仪,而3轴的一个就能替代三个单轴的。3轴的体积小、重量轻、结构简单、可靠性好,是激光陀螺的发展趋势。
