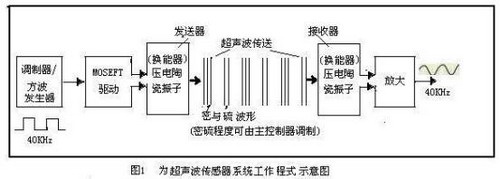
MSP430单片机倒车雷达系统的设计-系统采用超声波测距原理。超声波测距仪器一般由发射器、接收器和信号处理器三部分组成。工作时,超声波发射器发出超声波脉冲,超声波接收器接收遇到障碍物反射回来的反射波,准确测量超声波从发射到遇到障碍物反射返回的时间,根据超声波的传播速度,可以计算出障碍物距离。
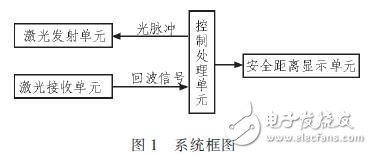
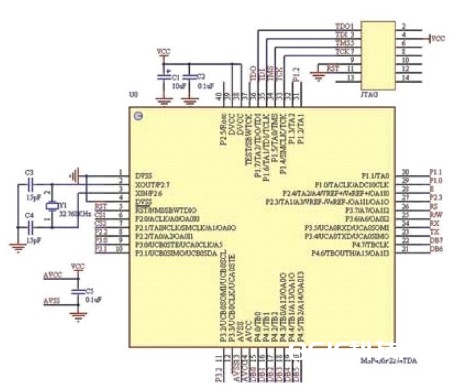
LCD电路及高速ADC+FPGA+ DSP的设计方案介绍-随着人们生活水平的提高,公路上的私家车辆也增多了,但随之带来的问题就是交通事故发生率居高不下,严重危害着人们的生命安全。文中就如何预防交通事故发生,研究设计一种响应迅速、高可靠性并且经济实用的汽车防擅报警设备。该设备在设计过程中的关键任务是利用置于汽车车头左右两端的双路通道高速采集激光雷达回波信号并对其进行实时存储和处理,进而快速测量自身交通工具与障碍物之间的距离及相对速度。
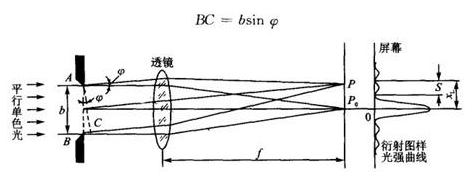
激光衍射传感器的特性及原理解析-光束通过被测物产生衍射现象时,在其后面的屏幕上形成光强有规则分布的光斑。这些光斑条纹称为衍射图样。衍射图样和衍射物(即障碍物或孔)的尺寸,以及光学系统的参数有关,因此根据衍射图样及其变化就可确定衍射物,也就是被测物的尺寸。
基于OPT9221 ToF传感器的立体视觉和深度感知电路设计-成像对于许多机器人应用至关重要,能让机器人执行基本任务,躲避障碍物,进行导航以及确保基本安全。
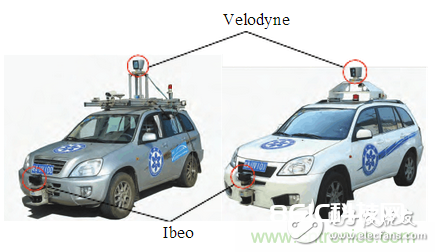
基于激光传感器的无人驾驶汽车动态障碍物检测跟踪- 针对激光传感器在室外环境中检测动态障碍物所遇到的数据处理存在延时、检测结果准确率不高等问题,提出了一种基于3维激光传感器Velodyne和四线激光传感器Ibeo信息融合的动态障碍物检测及表示方法。该种方法应用在了自主研发的无人驾驶汽车平台上,大量的实验以及它们在“中国智能车未来挑战赛”中的优异表现证明该方法具备可靠性和准确性。
自动驾驶技术的超声波传感器应用-超声波主要用于泊车测距、辅助刹车等,量程较短等,然而在倒车辅助过程中,超声波传感器通常需同控制器和显示器结合使用,从而以声音或者更为直观的显示告知驾驶员周围障碍物的情况,解除驾驶员泊车、倒车和起动车辆时前后左右探视所引起的困扰,并帮助驾驶员扫除视野死角和视线模糊的缺陷,提高驾驶安全性。 使用效果上,超声波雷达穿透性强,测距的方法简单,成本低。


盘点无人机避障技术原理及厂商-顾名思义就是无人机自主躲避障碍物的智能技术。很多玩过无人机的小伙伴们都知道,有避障功能的无人机和没有避障功能的无人机,可以说体验是大不相同的!无人机自动避障系统能够及时地
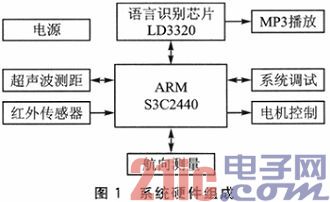
基于嵌入式Linux的移动机器人控制系统, 摘要:以嵌入式Linux开发平台为基础,根据模糊控制算法进行机器人路径规划,同时将两自由度云台和超声波测距模块相结合,扩大了障碍物检测范围。根据测试,移动机