


基于STM32的四旋翼飞行姿态串级控制的设计与实现-本文主要介绍了基于STM32的四旋翼飞行姿态串级控制的设计与实现,行器控制器通过处理微型MEMS惯性器件和三维地磁传感器采集的数据,计算飞行器的姿态角,并根据飞行指令,结合相应的控制律给出适当的控制信号,控制飞行器姿态和位置。能够实现飞行姿态的稳定控制,达到了设计的目的。

空间飞行器上加速度传感器的作用讲解-在空间飞行器的惯性测量系统,机器人的机械臂延展确定,车船体倾斜测量,岩体倾向判断和工程钻孔轨迹检测等许多方面都需要测量物体的倾斜和方向等参数。
基于嵌入式ARMv7的监测飞行器系统设计, 智能飞行器是指由无线电地面遥控飞行或和自主控制飞行的可垂直起降的不载人飞行器。近年来,智能飞行机技术日趋成熟,性能不断完善,逐步向小型化、智能化、隐身方向发
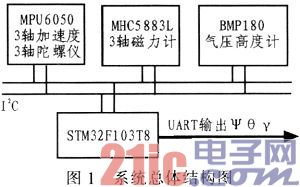
基于ARM的微型航姿参考系统设计与实现,摘要:针对微小型无人飞行器的控制需要精度高、体积小、功耗低的姿态信息模块,介绍了一种基于MEMS器件与ARM控制器的微型航向姿态参考系统(AHRS),包括三轴加

前言 最近几年四轴飞行器的市场慢慢火起来了,大家也都 或多或少地从各个方面接触到了四轴,在市场上,大家了 解最多的估计就是以四轴飞行器为载体的航拍应用了。本系 列的主要目的就是提供一个四轴飞
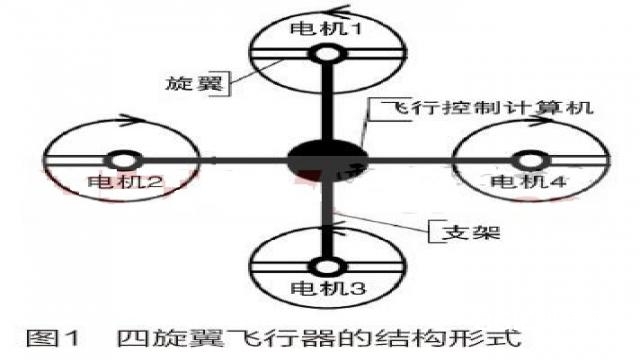
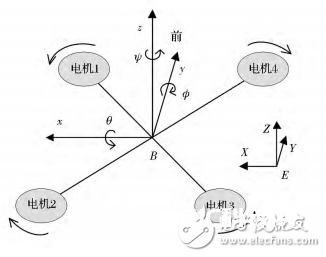
引言四旋翼飞行器是一种具有6个自由度和4个控制输入的可垂直起降、悬停、前飞、侧飞和倒飞的无人驾驶飞行器,4只旋翼可相互抵消反扭力矩,不需要专门的反扭矩桨。被广泛应用于无人侦察、森林防火、灾
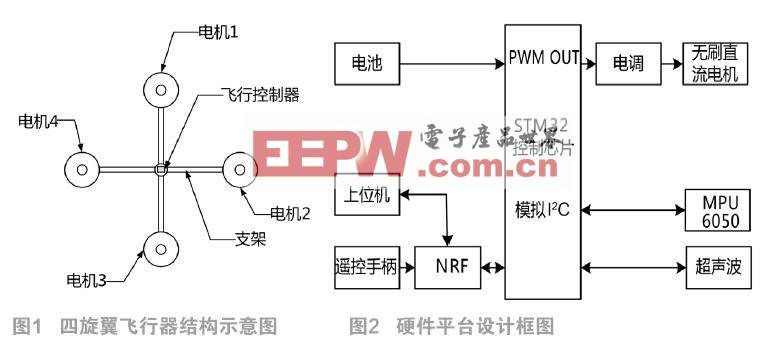
本文基于四旋翼飞行器的工作原理和性能特点,给出了飞行器控制系统设计方案,进行了姿态和高度数据采集的软件设计,并基于卡尔曼滤波算法完成了传感器数据融合,设计了PID控制器并完成了软件实现。实验结果表明,
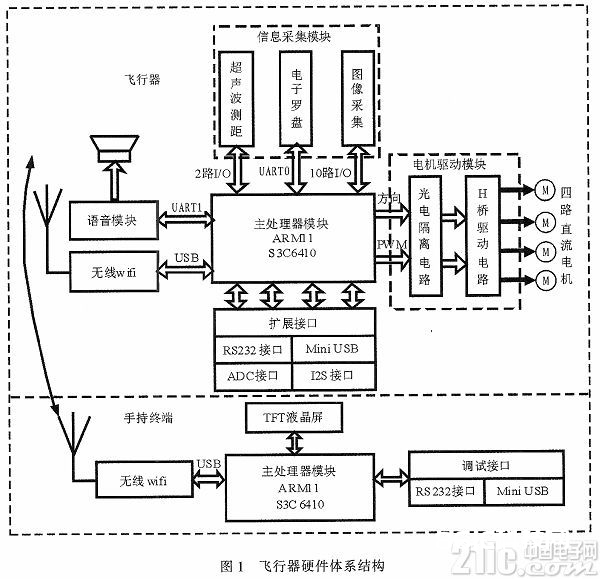
摘要:应用嵌入式技术、无线传输技术和图像处理技术,设计目标搜索飞行器,为防灾救灾提供技术服务。系统包括手持终端和飞行器,采用 ARM11架构的S3C6410微处理器,移植Linux操作系统。飞行器携

研究一种基于TMS320F28335 DSP(Digital Signal Processor)的全数字飞行器控制系统的硬件设计,分析了其结构组成:主控制器电路、舵面位置检测电路和通讯等硬件电路设计

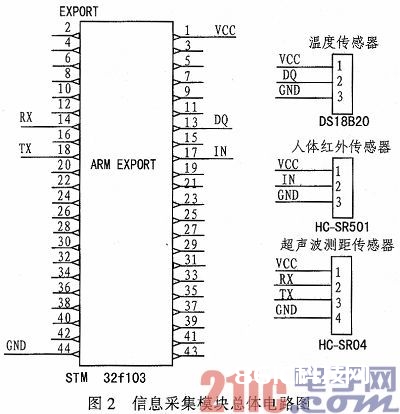
目前无人飞行器主要飞行于大气对流层和平流层低层区间。该区间大气温度变化复杂,大气环境的温度过低或过高都将直接影响无人飞行器控制系统的正常工作。由于无人飞行器机身需要检测温度的部位较多,监测目标比较分散
