


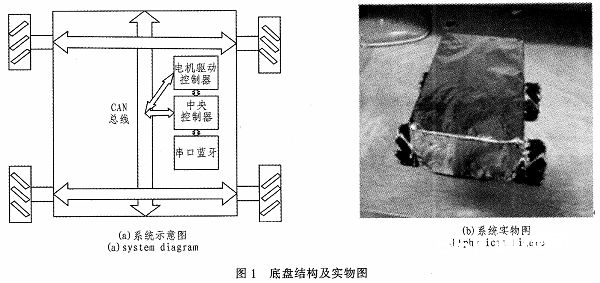
设计一种麦克纳姆轮全向行走运输平台的体感交互控制系统。该系统应用kinect体感器提出骨骼运动信息识别和基于深度手势识别的两种控制方式,应用于不同场景。基于骨骼运动信息识别控制方式通过kinect获取

基于MEMS的系统可以显著提高髋关节和膝关节植入体与病人骨骼结构的对准精度,减轻不舒适感,从而避免进行修正手术。导航通常与汽车、卡车、飞机、轮船,当然还有人相关。但是,它也开始在医疗技术领域。
基于MEMS的系统可以显着提高髋关节和膝关节植入体与病人骨骼结构的对准精度,减轻不舒适感,从而避免进行修正手术。导航通常与汽车、卡车、飞机、轮船,当然还有人相关。但是,它也开始在医疗技术领域发挥重要
基于MEMS的系统可以显着提高髋关节和膝关节植入体与病人骨骼结构的对准精度,减轻不舒适感,从而避免进行修正手术。导航通常与汽车、卡车、飞机、轮船,当然还有人相关。但是,它也开始在医疗技术领域发挥重要作

基于MEMS的系统可以显着提高髋关节和膝关节植入体与病人骨骼结构的对准精度,减轻不舒适感,从而避免进行修正手术。本文将研究医疗导航应用的独特挑战,并且探讨可能的解决方案.

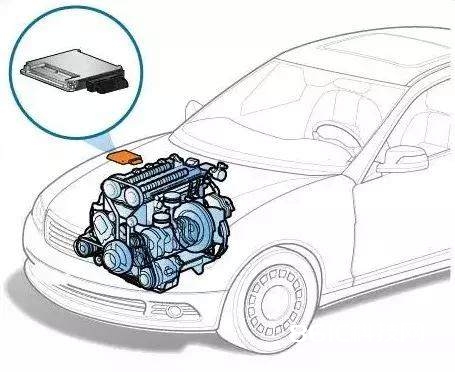
人类有大脑,电脑有CPU,而汽车则有ECU。显然,如果将一辆车比喻成一个人的话,那么,四个轮子就是人的四肢,车身和底盘是人的骨骼,各种电路和线路是人的反馈神经,而ECU则是控制人的各种思维和行为的大脑
