


PID操控是最早发展起来的操控战略之一,因为其算法简略,鲁棒性好和可靠性高,被广泛用于工业操控傍边。惯例PID操控体系原理框图如下,该体系由模仿PID操控器以及被控目标组成。

PID操控器是一种线性操控器,它依据给定值r(t)与实践输出值y(t)构成操控误差:e(t)=r(t)-y(t)
将误差的份额(P)、积分(I)和微分(D)经过线性组合构成操控量,对被控目标进行操控,故称PID操控器。其操控规则为:

式中:Kc - 份额系数;TI - 积分时刻常数;TD - 微分时刻常数。
一:PID 操控特色
原理简略,运用方便,适应性强:能够广泛应用于各个工业操控范畴,鲁棒性强:即其操控品质对被控目标特征的改动不大灵敏。
二:PID份额环节
P调理对误差信号e(t)能够及时作出反应,无任何一点点的滞后。输出u实践上是对起始值的增量,因而,当误差e(t)为0时,u=0,并不意味着调理器没有输出,只阐明此刻u=u0。u0的巨细是能够经过调整调理器的作业点加以改动的。简略来说,关于份额环节,误差一旦发生,操控器就会当即发生操控效果,以削减误差。
三:积分环节
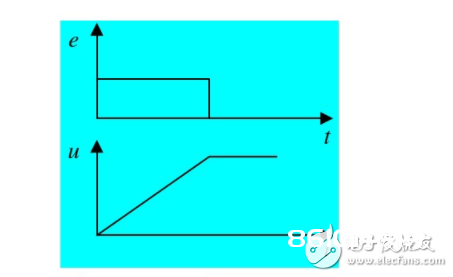
I调理器的输出不只与误差信号的巨细有关,还与误差存在的时刻长短有关。只需误差存在,调理器的输出就会不断改动,直到误差为零,调理器的输出才稳定下来不再改动。所以积分调理效果能主动消除余差。留意I调理的输出不像P调理那样随误差为零而变到零。
积分调理的特色便是无差调理,只需误差不为零,操控输出就不为零,它就要动作到把被调量的静差彻底消除停止。而一旦被调量误差e为零,积分调理器的输出就坚持不变。积分调理具有滞后性质,关于同一个被控目标,I调理比P调理进行得要缓慢,除非积分速度无穷大,不然I调理就不能像P调理那样及时对误差加以呼应,而是滞后于误差的改动,它的滞后性使其难以对搅扰进行及时操控。
所以在工业操控中,积分环节一般和其他操控战略一同运用。简略来讲,积分环节首要用于消除静差,进步体系的无差度。积分效果的强弱取决于积分时刻常数TI,TI越大,积分效果越弱,反之则越强。






