


智能机器人作为一个高新科技的综合体,直接反响了一个国家信息技能的发展水平,受到了社会各界的高度重视。智能机器人触及了信息技能的简直所用内容,能够让学生触摸并看到信息技能的全景,并且智能机器人是信息技能的敞开渠道,学生能够充分发挥想象力去开发各种智能设备,然后培育学生对信息技能的开发才能,在开发进程中,培育各种才能,激起学生的爱好。
本文规划的以智能小车为载体的依据TMS320LF2407A教育机器人硬件渠道,包含电源模块和电机驱动模块电路规划,并集成了红外和光敏传感器和无线数据传输模块,经过软件规划可完结寻迹、避障及寻迹避障相结合的功用,到达了理论课程学习与着手实践相结合的意图,稳固了常识并进一步提高了学习者的爱好。
1 规划思维与全体方案
1.1 教育机器人的规划思维
本教育机器人以TMS320LF2407A微操控器为中心,由红外传感器和光电传感器等各种传感器收集的外部环境信息作为输入信号,经过DSP进行运算处理,运用PWM技能实时输出调整小车的速度和方向,完结小车寻迹、避障、寻迹加避障等自动操控的功用,另外在小车于寻迹过
程中遇到妨碍物,当寻迹加避障算法在寻迹的一同不能完结避障功用时,可由PC机与其相连的无线通讯收发模块和DSP相连的另一无线收发模块完结无线短间隔通讯,操控小车脱离妨碍区并进行正常寻迹。
1.2 全体规划方案和框图
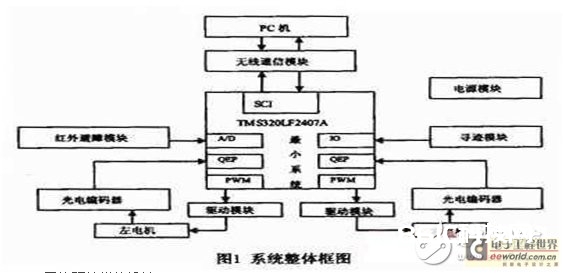
机器人小车体系全体框图如图1所示,主要有TMS320LF2407A最小体系部分、电源模块、电机驱动模块、传感器模块、无线通讯模块构成,完结由车载的各种传感器将信息不断地传递给车载微操控器,并将编程规划算法下载至微操控器完结实时调整小车的运动状况,完结必定的功用要求。
2 体系硬件模块规划
2.1 TMS320LF2407A最小体系规划
TMS320LF2407A是2000系列中现在运用最为广泛的产品,它在片上不只具有一个适于进行数字信号处理的高效处理器,并且还集成了存储器和习惯操控范畴运用的丰厚片上外设,然后构成了一个根本的片上计算机体系。除了具有改善的哈佛结构、多总线结构和流水线结构等长处外,它还选用高性能静态 CMOS技能,电压降为3.3V,减少了功耗,指令履行速度提高到40MIPS,简直一切指令都能够在2 5ns的单周期内完结。TMS320LF2407A的根本结构包含中心处理器单元(CPU)、存储器、片内外设与专用硬件电路三个组成部分。本体系硬件渠道充分运用TMS320LF2407A操控器的特色选用模块化规划,分为根本电路和扩展操控电路部分。根本电路包含电源电路、复位电路、时钟电路、A/D 输入通道和JTAG仿真电路等。扩展电路包含存储器及译码电路、串行通讯SCI与RS-232接口电路、CAN接口电路、SPI功用模块等。体系硬件原理框图如图2所示。

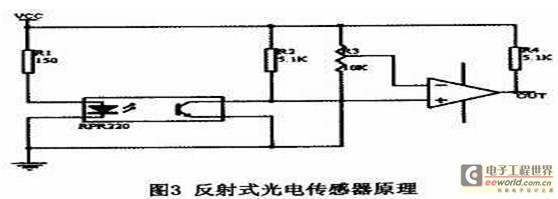
此部分选用光电传感器对路面信息进行辨认。选用RPR220型光电对管,RPR220是一种一体化反射型光电探测器,其发射器是一个砷化镓红外发光二极管,接纳管是一个高灵敏度的硅平面光电三极管,用3个该红外对管构成“一”字形摆放在小车车头的底部,途径轨道由黑线指示,依据落在黑线区域的光电三极管接纳到的反射光线强度与白色区域的不同,由检测到的黑线光电管的方位来判别小车的方位方向看其是否违背黑线,当红外对管的发射二极管宣布红外线,经反射物 (白线)反射到接纳管,是接纳管集电极与发射极之间的电阻变小,输入端电位变低,经比较器比较后输出低电平,当红外线照射到黑线上时,反射到接纳管上的亮光减小,接纳管的集电极与发射极间电阻增大使得输出高电平,将输出端信号送至2407A进行剖析处理,反射式光电传感器原理如图3所示。3个传感器中假如坐落中心的传感器(中传感器)检测到黑线,从传感器将宣布“有线”信号,后轮两电机持续接通作业,成果驱动车体跋涉。假如除中传感器之外,左、右传感器中的任一个未检测到黑线,则该传感器输出“无线”信号,这时脱离引导线的传感器对侧的驱动电机中止运转,同侧电机持续运转,以此到达校对跋涉方向的意图。
2.3 红外避障模块规划
在小车跋涉进程中遇到妨碍物,无法正常经过期,选用红外线检测器检测妨碍物,并规划算法操控小车绕开妨碍物持续寻迹跋涉。在小车前端两边别离装置1个红外发射二极管(如东芝TLN110)进行红外信号的发射,红外线光源宣布的信号调制到38kHz,运用2407A的PWM输出发生准确的信号。红外接纳器由装置在车头中心的专用红外接纳模块(如CRVPl738)对红外信号进行接纳。小车跋涉道路中妨碍物的判别准则:a.左面红外发射二极管发射信号,检测中心接纳端,判别是否接纳到信号;b.右边红外发射二极管发射信号,检测中心接纳端,判别是否接纳到信号;c.若左面发射时,有信号接纳则小车左面有妨碍物;若右边发射时,有信号接纳则小车右边有妨碍物;若左面和右边发射时,都有信号接纳则小车正前方有妨碍物。
在小车跋涉进程中有三种避障算法:沿左面行走,沿右边行走,左右相结合行走。本规划要完结在多种环境下都能避障,所以挑选左右结合行走的算法。在小车左、右侧两边等比例装置若干红外测距传感器(GP2D12),用于防止小车在避障进程中与妨碍物发生磕碰,因为GP2-D12输出为0.4~2.4V的模拟信号,对应80~10cm间隔,输出与间隔成反比联系,且为非线性,可直接运用2407A集成的A/D转化功用,进行A/D转化得到相应参数,依据参数由 DSP进行相应处理,进行避障跋涉。在避障进程中,选用挨近式操控战略,保持妨碍物和传感器之间的间隔为一固定常数,当两者间隔偏小时,机器人向远离妨碍物的方向旋转;当两者间隔偏大时,向接近妨碍物的方向旋转。小车沿妨碍物跋涉进程中,在车头底部光电传感器检测到黑线时,小车开端调整跋涉姿态,远离妨碍物,持续寻迹。另外在小车无法成功绕过妨碍物持续寻迹时,能够经过无线通讯模块操控小车绕过妨碍物使其持续寻迹。
2.4 无线通讯模块规划
在机器人无法成功避障的情况下,可经过DSP与上位机(PC机)之间的通讯协作来完结避障使命。DSP与PC机之间的通讯方法分为有线和无线两种,大都选用串行通讯。在本规划中选用无线通讯方法,能够战胜有线通讯形成的操作不便利。PTR2000是依据nRF401器材的无线数据传输模块,具有低频发射、灵敏度高的特色,使其在嵌入式短程无线产品中得到广泛的运用。要完结DSP与PC机之间的无线通讯,需在DSP与小车车体别离装置一个 PTR2000器材,其体系硬件结构框图如图4所示。经过2407A的RXD和TXD引脚与PTR2000的DO和DI引脚直接相连,2407A的操控引脚与PTR2000形式操控引脚相连完结PTR2000于DSP之间的衔接,经过选用MAX232器材在PTR2000和计算机串口进行RS-232和 TTL电平之间的转化后,完结PTR2000和PC机串口的衔接。在DSP和PC机端软件合作设置PTR2000的状况(发射或接纳),挑选固定的通讯频道,并让PTR2000一向处于正常作业状况,再经过规划软件体系完结无线通讯的功用。

电源模块可由16V沟通电压充电器经过电源充电电路为6节车载镍镉电池(约7.2V)充电,为各模块供给作业电压。电源电路模块如图5所示。因为各模块所需作业电压不同,可先经过运用78(L)05稳压器得到5V直流电压,2407A所需3.3V电源由带集成延时复位功用的低压差稳压器TPS733Q完结,一同具有复位功用。如图5所示。

2.6 电机驱动模块规划
本轮式机器人渠道选用左、右直流电机驱动的方法,中心有一同支撑效果的万向轮。电机驱动模块能够完结两电机在任何方向旋转然后到达小车跋涉、后退和转向的意图。电机发生转向与否是由供给给电机驱动电路的高、低电压信号次第决议的,它们来自前端的数字逻辑门定序电路。数字逻辑定序电路的输入信号由 2407A 发生的方向信号和PWM信号完结机器人的方向和速度的操控分为方向端和使能端,该电路一同能够防止发生电源短路对电子器材形成的危害。此小车电机驱动电路是H桥驱动电路,该电路经过操控电机电流流向到达操控转向的意图。当Q1和04导通时,电机电流从左流向右,电机正转;当Q2和Q3导通时,电机电流从右流向左,电机回转。如图7所示。

3 体系全体完结
以TMS320LF2407A为中心的教育机器人硬件体系全体功用可在软件开发工具CCS和硬件开发工具XDS的支持下选用C语言和汇编语言混合编程进行程序仿真调试,再经过JTAG接口下载到DSP内完结,给DSP学习者带来了极大的便利。一同,得益于2407A外部资源的丰厚性,体系中未运用部分有利于学习者做进一步的功用开发和运用。
4 结语
该全体硬件体系结构简略,具有很好的扩展性,并且经过软件编程操控机器人完结必定的功用,很好地训练了学生的逻辑思维才能和编程才能,有助于培育学生的实践能.






