


AGV全称Automatecl Guided Vehicles,是一种装有自动扶引设备,可以沿规则的途径行进,具有编程和泊车挑选设备、安全保护设备以及各种物料移载功用的自动导航车。障碍物检测是自动导航车研讨的一个基本问题,是完结安全、正常作业的条件。超声波传感器以其价格低廉、测距精度高、丈量安稳、体积小等长处,被广泛用于AGV的避障检测。本文以超声波传感器为根底,结合CAN总线技能,规划一种AGV避障模块,完结精确、有用、安稳的障碍物检测,保证AGV的安全运转。
1 超声波传感器波束角丈量
该避障模块运用的超声波传感器内部以渡越时刻法进行测距。并自带温度传感器对丈量成果进行校对,可以对2 cm至4.5 m间隔规模内的障碍物完结精确的间隔丈量。开端丈量时,操控器经过UART向超声波传感器的TX引脚输入触发信号,传感器发送探头发动并发射超声波脉冲,然后接纳探头进入回波检测状况。在接纳探头检测到回波信号后,结合温度补偿核算测距成果,并经过传感器的RX引脚输出间隔丈量数据。
1.1 超声波传感器测距数据收集
因为超声波传感器的勘探波束角较小,在其实践运用中,一般运用多个传感器组成传感器阵列,以扩展勘探规模。超声波传感器阵列的构建,须处理传感器在AGV上的布局问题,具体来说便是传感器数量和装置间隔的挑选问题。传感器数量和装置间隔的挑选须依据最小盲区要求确认,而超声波传感器的勘探波束角是核算盲区的重要参数,因而需求规划试验丈量传感器的勘探波束角。
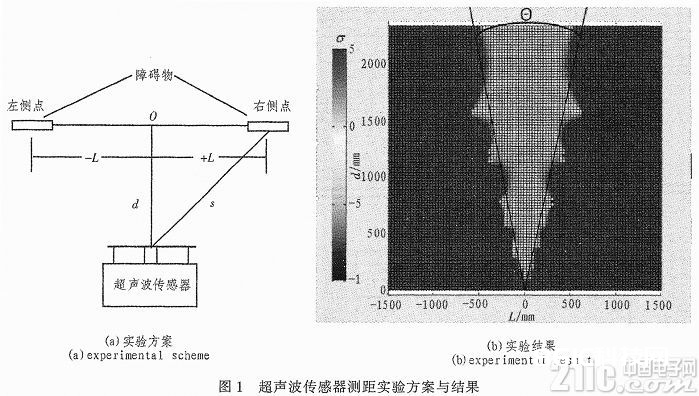
如图1的(a)所示,将超声波传感器固定于某点,在其前方挑选与传感器探头间隔为d的某点放置障碍物,进行测距试验并记载测距值。为了使试验成果可以充分反映实践情况,试验中选取不同间隔d,且关于每个间隔,以超声波传感器中轴线为原点,在左右两边都挑选离中轴线间隔为L的多个点来放置障碍物。试验AGV对避障模块所要求的检测间隔为0~2.5 m, 试验中选取的d序列为[100,200,300,400,600,800,1 200,1 600,2 400] mm;常用的超声波传感器波束角一般小于60°,所以关于每个间隔d,在离中轴线[-0.6xd,0]和[0,0.6xd]规模内以相同间隔各选取10个点作为L的值。
1.2 超声波传感器测距数据处理
在图1(a)的试验中,运用勾股定理,可以得到障碍物试验中摆放方位与超声波传感器的实践间隔:
对试验中的每一个测距值s’,结合式(1)和式(2)可核算出相应的相对误差。将试验数据导入至Matlab中,以L为横坐标、d为纵坐标、σ为竖坐标,对其插值并作图,如图1(b)所示。
从试验成果可以看出,将障碍物摆放于超声波传感器可检测到的区域时,检测成果的相对误差都可以满意σ6%,因而在图1(b)中选取相对误差σ6%的区域,可得到超声波传感器的波束角约为θ=40°。
2 AGV避障传感器布局规划
2.1 传感器数量和布局方法挑选
AGV避障模块检测的盲区巨细与超声波传感器的装置数量、装置间隔有关,传感器数量越多、装置间隔越小,检测盲区就越小,反之则大。超声波传感器运用障碍物对声波的反射作用进行间隔检测,这一特性也决议了穿插串扰现象的存在,即一个传感器发射的声波经障碍物反射后,可以被相同检测方向的传感器接纳到,然后发生过错的测距成果。因而在运用多个超声波传感器进行障碍物检测的场合,常选用传感器替换作业方法,即某一时刻有且只要一个超声波传感器在检测障碍物。若传感器装置数量过多,AGV避障检测周期就会增大,影响其检测实时性,然后对AGV的安全作业发生不利因素。从减小盲区和进步避障检测实时性两方面归纳考虑,从试验AGV的500 mm车宽动身,开始确认在所运用的试验AGV的车头装置4个超声波传感器。因为试验AGV不需求倒车和侧向移动,所以其车尾和旁边面不需求装置超声波传感器。
为了使每两相邻超声波传感器之间的检测盲区巨细保持一致,4个传感器选用等距布局的方法,如图2(a)所示。两相邻传感器的间隔为:
2.2 避障预警间隔和检测盲区核算
如图2(b)所示,间隔AGV两边250 mm规模内为旁边面安全间隔。中心的2、3号超声波传感器作为主勘探器,两边的1、4号为辅佐勘探器。其间辅佐勘探器用于减小主勘探器的丈量肓区。主勘探器和辅佐勘探器的预警间隔别离为:
在AGV的避障检测中,当障碍物进入2、3号超声波传感器的d3规模或1、4号超声波传感器的d2规模内时,AGV泊车报警。
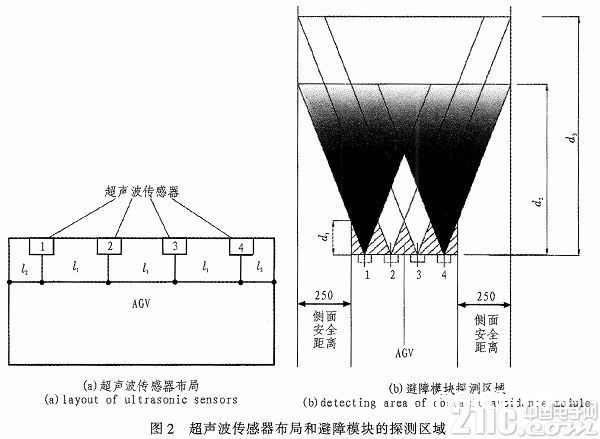
在图2(b)中,AGV车头前面的暗影部分为避障检测模块的检测盲区区域,由多个三角形组成,该区域垂直间隔(即三角形的高)为:
![]()
可见,在此布局计划中,AGV避障模块的检测盲区较小,合作装置于车头的防撞杆,可以满意AGV安全运转的要求。
3 AGV避障模块硬件规划
3.1 避障模块硬件结构
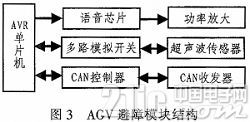
AGV避障模块的硬件结构如图3所示,模块以AVR单片机为操控中心。在避障检测时,因为每次只要一个超声波传感器处于作业状况,所以4个超声波传感器可经过多路模仿挑选开关同享AVR单片机的UART接口。当避障模块预警区域存在障碍物,AVR操控语音芯片播映语音提示,并经过CAN总线将预警状况和障碍物间隔发送到AGV的总操控器。
3.2 语音预警功用电路
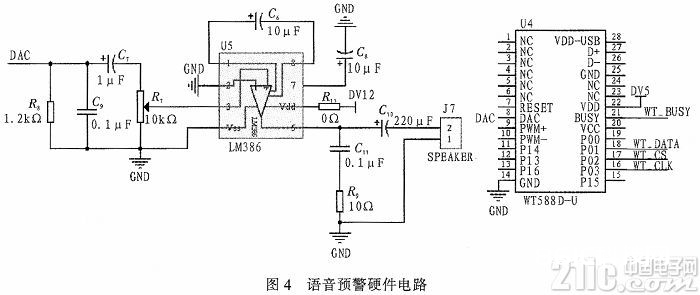
AGV避障模块语音预警功用电路如图4。当障碍物进入预警区域,AVR单片机经过三线串口操控WT588D-U语音芯片读取内部的音频文件,并输出相应音频信号,经LM386功率放大后输出到小型喇叭。经过调理R7变阻器调理端可改动语音预警的音量巨细。
3.3 超声波传感器操控电路
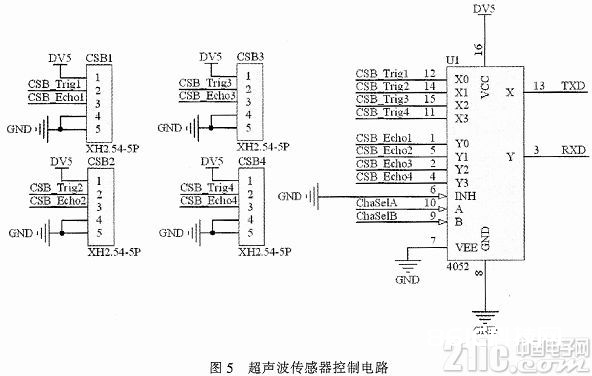
如图5所示,AVR单片机经过CD4052多路模仿挑选开关对四个超声波传感器进行操控。ChaSelA和ChaSelB信号的四个不同状况组合别离代表模仿开关的四个通道。CSB_TrigN和CSB_EchoN别离是超声波传感器触发信号输入端和测距数据输出端。作业时,运用ChaSelA和ChaSelB信号挑选所要操控的超声波传感器,模块操控器经过TXD引脚向所选定的传感器发送触发信号,传感器即向前方发送声波,并在接纳到回波信号后,向操控器发送测距数据。
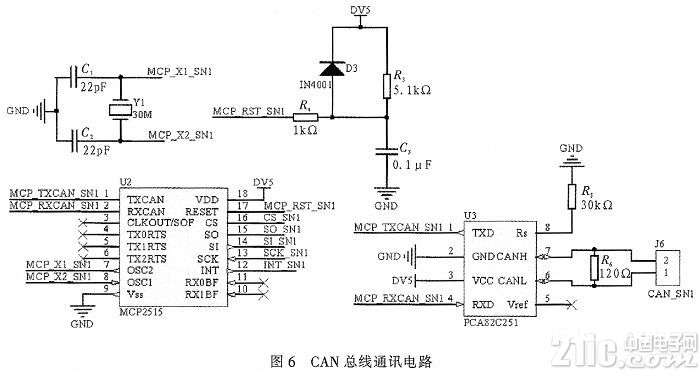
3.4 CAN总线通讯电路
AGV避障模块引入了CAN总线技能,可以将预警状况和测距数据上传到总操控器,完结分布式操控。CAN总线通讯电路主要由CAN通讯操控器MCP2515、CAN总线收发器PCA82C251及相应的复位、时钟电路组成,如图6所示。避障模块操控器经过SPI接口将预警状况和测距数据发送到CAN总线操控器MCP2515,由MCP2515转换成异步信号输送到CAN总线收发器PCA82C251,并终究发送到CAN总线上。
4 AGV避障模块软件规划
避障模块所运用的AGV渠道依据CAN总线构建其车载分布式操控体系,操控体系的CAN运用层协议选用问答形式,即CAN通讯网络的某个节点自动建议的数据帧传输(问询帧),有必要得到数据帧接纳节点的应对(应对帧),否则将进行重发。问答形式进步了操控体系运转的牢靠性。
AGV运转时,当障碍物进入预警规模,避障模块播映语音提示,并经过CAN总线向操控体系总操控器发送预警音讯。操控体系总操控器接纳到预警音讯后,向避障模块发送应对帧,并操控电机减速或泊车。此外,操控体系总操控器可以向避障模块发送问询帧,操控其封闭或敞开避障检测和语音提示功用,因而AGV在运转时,避障模块经过CAN总线发送的音讯有两类:自动建议的问询帧和对其他节点发来的问询帧的应对帧;经过CAN总线接纳的音讯也为两类:其他节点发来的应对帧和问询帧。
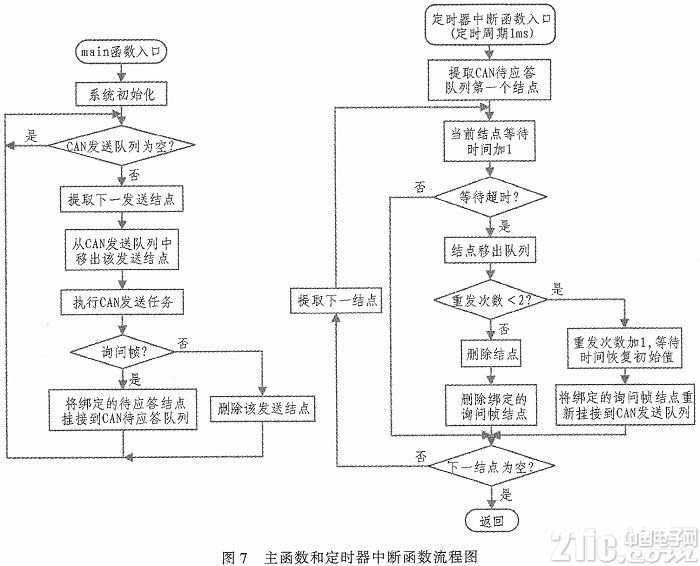
该避障模块的软件依据链表创立了两个CAN音讯行列:CAN发送行列和CAN待应对行列。发送问询帧时,创立发送结点,挂接到CAN发送行列中,并一起创立对应的待应对结点,两者经过指针成员彼此绑定。发送应对帧时,创立发送结点并挂接到CAN发送行列,此刻不需求创立待应对结点。如图7所示,主函数轮询CAN发送行列是否为空,若不为空,取动身送结点并履行CAN数据帧的发送。假如发送结点为问询帧,履行发送后,将绑定的待应对结点挂接到CAN待应对行列,等候数据帧接纳节点的应对。软件运用定时器作为体系时钟,在定时器中止函数中对CAN待应对行列中每个待应对结点的等候时刻进行计时。若某个待应对结点等候超时,移出待应对行列并将绑定的发送结点从头挂接到CAN发送行列,履行重发。在屡次重发都没有得到应对时,删去该待应对结点和绑定的发送结点。若某个问询帧等候应对超时前接纳到应对帧,标明该次CAN问询帧传输成功,并且在CAN数据帧接纳处理函数中删去相应的待应对结点和绑定的发送结点。
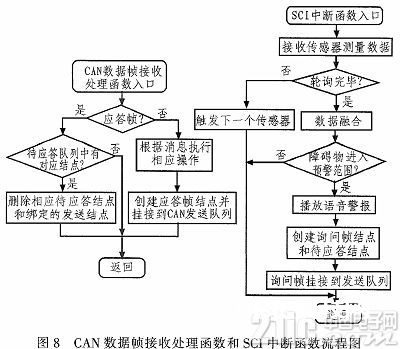
如图8所示,CAN数据帧接纳处理函数也对避障模块接纳到的其他CAN节点发送的问询帧进行解说,履行相应操作,并创立应对帧挂接到CAN发送行列。软件运用SCI中止函数轮询4个超声波传感器的检测数据,并在完结一次轮询后对检测数据进行交融,依据数据交融处理的成果判别障碍物是否进入预警间隔。当障碍物进入预警间隔,对预警音讯创立发送结点和待应对结点,并将发送结点挂接到CAN发送行列,一起播映语音提示。
5 试验运用
将所规划的避障模块装置到试验AGV上,使AGV上电运转,并在运转中进行障碍物检测测验。在测验时,运用车载触摸屏的状况显现界面可以读取、显现超声波传感器检测数据和避障预警信息。当在AGV行进途径上放置障碍物时,避障模块可以精确检测到障碍物间隔,当障碍物进入预警规模时,及时向总操控器上报预警信息。经过实践运用发现,该避障模块测距成果精确。作业安稳牢靠。
6 定论
该避障模块选用超声波传感器为勘探器,经过试验丈量,结合Matlab处理得到传感器检测波束角,终究确认超声波传感器在AGV上布局方法。以AVR单片机为操控中心,融入语音提示功用和CAN总线技能,对避障模块的硬件和软件进行开发,可以将预警状况和检测数据上传到AGV总操控器,完结分布式操控。试验运用标明,该模块具有运转安稳、作业牢靠等特色,达到了规划要求。该模块已运用到试验AGV上,检障作用杰出,运转安稳,牢靠性高,可以保证AGV的安全作业,达到了规划要求。






