摘要:针对细小型无人飞翔器的操控需求精度高、体积小、功耗低的姿势信息模块,介绍了一种依据MEMS器材与ARM操控器的微型航向姿势参阅体系(AHRS),包含三轴加速度计、三轴陀螺仪、三轴磁力计和气压高度计,选用四元数法进行姿势解算并给出了磁航向校对的办法,选用LabWindows/CVI开发了上位机界面,能够完结对其输出信号进行实时显现,实践测验中到达较为满意的作用。
航向姿势参阅体系(Attitude and Heading Reference System,AHRS)是一套由惯性丈量元件(IMU)和地磁传感器组成的三自由度姿势丈量单元,能够供给航向、横滚和侧翻等姿势信息,可完结动态环境下载体实时姿势航向操控。它是细小型飞翔器能够按预订轨道进行自主巡航的根底环节,也直接影响着细小型飞翔器执行任务的作用,尤其是在起飞、下降阶段,航姿体系作业不正常,会对飞翔安全构成严重要挟。因为细小型飞翔器体系对体积、分量、功耗、本钱的特殊要求,传统的大中型飞翔器上的巨大、贵重的陀螺航向仪、无线电航向仪和磁力计等航向丈量设备将不再适用,相应的航向操控战略也无法完结,因而需求研发依据低本钱、低功耗、细小器材的航姿体系。
与惯性丈量单元(IMU)比较,航姿参阅体系(AHRS)包含了嵌入式的姿势数据解算单元与航向信息,主操控器只需经过串口读取所需数据,这样就大大减轻了主操控器的核算量及任务量。本文提出了一种低本钱的、有用的、依据四元数的姿势获取办法,最终经过实验对本规划的可靠性进行了验证。
1 总体规划
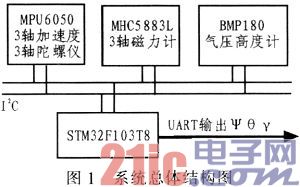
体系结构图如图1所示,使用加速度计、陀螺仪丈量细小型飞翔器的空间三轴加速度、角速度,磁力传感器能够丈量因姿势改变而构成的磁场在其各丈量轴上强度的改变,然后取得偏航角,高度计感知大气压的改变而得到相对高度。一切数据由主控芯片经过I2C总线收集。
关于数据处理部分,本文简略介绍了姿势解算原理与办法,从四元数、方向余弦矩阵及欧拉角的联系着手,并给出了四元数运动学微分方程及其解法,从理论上阐明晰该计划的可行性。
2 体系硬件规划
体系主操控芯片选用超小型封装、Cortex—M3内核的STM32F103T8,具有64KB Flash,20KB Rom,7通道DMA,7个定时器,可倍频至72 MHz,根本满意姿势解算所需的处理才能。各传感器的数据中止引脚与ARM操控器的IO相连,经过I2C总线,主控芯片能够在第一时间读取各个传感器完结AD转化后的数据,快速呼应姿势改变。一起引出了SWD调试接口,该接口只需4条线就能够对STM32F内核进行仿真调试,相关于常用的JTAG接口节节省了不少空间。
MPU—6050为全球首例整合性6轴运动处理组件,相关于多组件计划,有用避免了组合陀螺仪与加速器时之轴间装置差错的问题,节省了装置空间。MPU一6050的角速率量程为±250、±500、±1 000与±2 000°/s,可精确跟从快、慢动作。加速度丈量规模为±2 g、±4 g、±8 g与±16 g。内部自带16位的数字温度传感器,便利对传感器进行温度补偿。高达400 kHz的I2C总线可确保体系丈量的实时性。
HMC5883L包含最先进的高分辨率HMC118X系列磁阻传感器,并顺便霍尼韦尔专利的%&&&&&%,包含放大器、主动消磁驱动器、误差校准,使输出精度操控在1°~2°。12位I2C总线数字量输,丈量规模为±1~8 Gs,满意地磁场的丈量要。
BMP180是一款高精度、超低功耗的压力传感器,压力规模300~1 100 hPa(海拔9 000~500 m),低功耗形式下分辨率为0.06 hPa(0.5 m),高线性形式下,最小分辨率为0.03 hPa(0.25 m)。
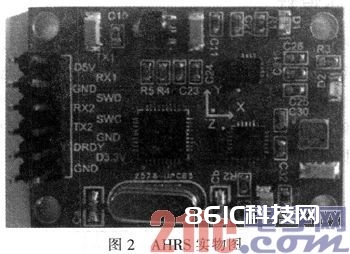
体系实物图如图2所示,外形尺寸为39*28 mm,具有微型化的特色。
3 姿势解算原理与办法
常用的姿势解算办法有欧拉角法、方向余弦法、四元数法等。因为欧拉角法存在奇点,四元数替代方向余弦阵来描绘姿势改变具有核算量小、精度高级长处,并且它既代表一个滚动,又可作为改换算子,因而被广泛应用于陀螺有用理论、捷联式惯性导航、机器人技能、多体体系力学及人造卫星姿势角操控领域中。
假定某一坐标系相对另一固定坐标系的滚动可看作是该坐标系环绕某一转轴进行了旋转,用u表明之一转轴,旋转了θ角,则滚动后的成果可用用四元数描绘:

3.1 四元数、方向余弦矩阵及欧拉角的联系
四元数将三维空间和四维空间联系起来,然后能够用四元数理论研究刚体的定点旋转问题。因而,把机体坐标系和导航坐标系的三维矢量扩展成四维,即
在进行坐标的旋转改换时,原坐标系通常是相对固定坐标系做了屡次旋转,能够将一切单次旋转构成的成果看作是初次与末次旋转间的一个组成滚动构成的成果,用组成四元数表明这样的旋转改换联系依据航向角、俯仰角、滚转角的滚动次序,由导航坐标系到机体坐标系的滚动四元数为


3.2 四元数运动学微分方程及其解法
与姿势矩阵对应的四元数具有如下的微分方程联系: