1 异步电动机转矩的发生原理
异步电动机和直流电动机不一样,其旋转磁场或磁通尽管也是由外部三相沟通电源供给,但影响要素许多,例如,电压、负载改变都会影响磁通,用简略的U/f 稳定操控在动态环境下(例如,起动、制动、负载骤变)是不可能肯定坚持磁通稳定。
为此,呈现了一种“矢量操控”办法,即把矢量方式的定子电流I1分解为两种成分,一种是为树立磁通称为励磁成分,另一种是发生转矩称为转矩成分,并且能够别离独登时进行操控。矢量操控的本质是动态操控U员、f,使椎m在静、动态时均肯定坚持稳定,终究到达电动机转矩精细可控的意图。
图1 为依据矢量操控的概念,把异步电动机发生转矩的原理与直流电动机作比较。图1(a)为直流电动机励磁绕组发生磁通的原理图,若从电刷方向来看电枢,可见励磁绕组轴与电枢绕组轴是直交的。若励磁磁通的方向为椎,电枢电流的方向为Ia,则依据法拉第左手规律可确认电枢绕组的受力方向为F,亦即电动机发生的转矩为

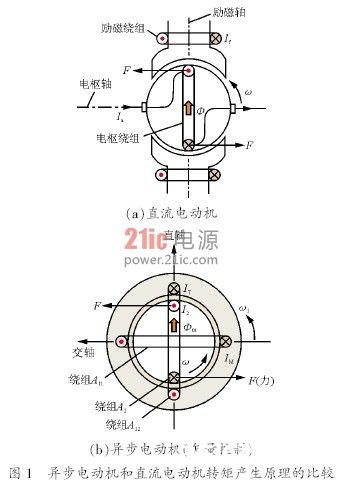
Lm为电枢绕组与励磁绕组间互感。
图1(b)为矢量操控的异步电动机转矩发生的原理示意图。图中,定子绕组上加了三相沟通电压,则绕组中将流过三相沟通电流,依据“物理电磁学”原理,三相沟通电流将发生组成的旋转磁
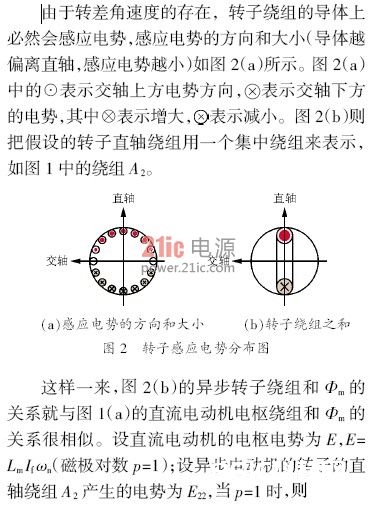

以上便是把异步电动机与直流电动机作比照,考虑的依据矢量操控的异步电动机转矩发生的原理。
这样,若从定子旋转磁场坐标系来看,则以为该坐标轴上有两个固定的(会集的)彼此直交的两个绕组,其间别离流过电流IM 和IT;并以为IM 是发生旋转磁场磁通椎m的励磁电流成分,IT则为发生转矩的并在定子侧反映出的转矩电流成分,它与转子电流I22对应。
在矢量操控中,因为励磁电流IM设定为恒值,磁通椎m与旋转磁场的速度无关,而IT是改变的,则转矩将和IT成比例关系并可自在调理。
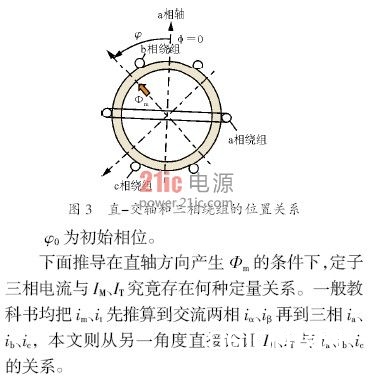
2 与定子三相电流对应的IT和IM