


跟着轿车普及率的逐年添加,顾客在将轿车作为交通运输工具的一起,对轿车装备有了更多的要求,尤其是对安全性提出了更高的要求。关于许多司机尤其是新手来说,倒车无疑是件十分头痛的事,倒车雷达正好能够帮司机处理这个难题,因而越来越多的商家看好这个商场。
从现在商场状况看,国内倒车雷达生产厂家都是运用单片机操控计划,缺少单芯片计划,假如能用单芯片完结整个体系功用,对倒车雷达生产商来说,不只能下降开发和生产本钱,对整机的可靠性也会有很大进步。现在成都国腾微电子有限公司推出了一款倒车雷达主控芯片——GM3101,与传统计划比较,它将信号处理电路和单片机软件规划都集成在芯片内,用户简直无需调试就能够推出整机计划,大大缩短了用户的开发周期和人力本钱,也下降了倒车雷达的技能门槛。
主控芯片GM3101的功用特性
倒车雷达主控芯片GM3101的首要性能参数为:作业温度为-40℃~+85℃;电源电压为5V;检测规模为0.3~3.95米,检测精度为0.05米;报警输出周期为150.4ms。4个探头轮番采样一次输出一次报警数据,它选用双线差分方法输出报警信号。报警信号包含:各探头检测到的障碍物间隔风险等级信号、最近障碍物方位信号、最近障碍物间隔信号及附加音讯。与传统的单片机计划比较较,其优势还在于:防声波衍射误报处理,进步报警信号的精确性;环境习惯功用,进步报警功用的实用性;智能辨认功用,能够忽略小物体,避免误报警。GM3101的内部框图如图1所示。
从图1能够看出,该芯片集成了信号处理部分和测距运算部分。当芯片接通电源后,探头驱动引脚向超声波探头发送驱动信号,驱动超声波探头宣布超声波信号,驱动信号发送结束后,芯片等候信号回来。探头接纳到超声波信号后,将信号送入芯片,进行信号扩大、滤波、模数转化处理,记载信号发送和接纳的时刻差,依据此时刻差核算障碍物间隔,并输出报警信号。超声波探头驱动选用分时次序的驱动方法,即顺次对4个探头轮番进行驱动,一个探头的作业周期内要包含发送和接纳两种操作。4个探头检测完结构成一个检测周期。若前一探头在本作业周期内没有接纳到回来的超声波信号,则芯片也转入操控下一个探头的作业。
余振处理及增益操控
1. 余振的处理
倒车雷达的规划过程中,余振的消除是一个让人头痛的问题,因为现在倒车雷达选用的探头都是压电陶瓷探头,所以当探头对外宣布16个超声波的一起,其本身的反射也会发生一部分余振,余振的信号起伏由大到小改变。因为用户运用的探头纷歧致,余振时刻也不相同,一般来说,余振时刻为1.5ms~2ms。因为余振出现在信道上,所以在余振时刻内所检测到的信号都会被余振吞没,在余振时刻内就检测不出有用的信号,当然也就无法测出相应的间隔。所以在倒车雷达规划中提出了一个“盲区”的概念,也便是说因为有探头余振的存在,就造成了在0.3m以内倒车雷达的“盲区”。假如在规划中不消除余振,体系就会把余振当作有用信号,输出过错的报警信号。GM3101在以下几个方面临超声波探头的余振进行了有用的处理。
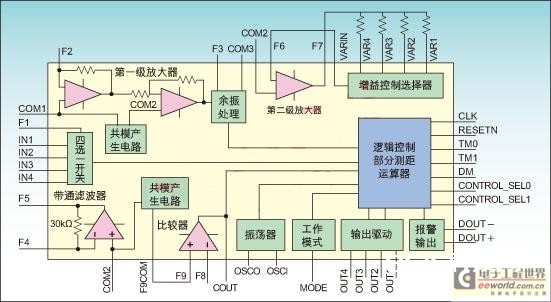 |
图1:GM3101内部框图 |
 |
图2:输入端箝位电路图 |
 |
图3:榜首级扩大电路原理图 |
 |
图4:消除余振后的信号波形(在引脚F3上观测) |
在榜首级扩大电路中对余振进行了屏蔽,但考虑到用户运用的探头类型纷歧,余振时刻不同较大,假如在榜首级扩大电路中对余振没有彻底消除,能够经过峰值检测电路中的余振屏蔽电路对没有消除的余振进行处理。峰值检测电路信号波形如图5所示,峰值检测电路进行了余振屏蔽,开端时刻开端后的1.8ms以内将输出信号拉到低电平,彻底屏蔽超声波余振。芯片所检测到的最近间隔也便是实践物体的间隔。
 |
图5:峰值检测电路波形图 |
超声波回波信号有一个现象,即近间隔物体发射回来的信号较强,远间隔物体发射回来的信号较弱。假如要检测远间隔物体,就需要加大扩大倍数,余振也会被相应地扩大,为今后屏蔽余振带来困难。怎么设置扩大倍数统筹远近间隔,这便是电路规划的要害,咱们选用自动增益选择器来处理这一问题。对远间隔物体,扩大倍数较大,对近间隔物体,扩大倍数较小。在规划第二级扩大器时,依据物体间隔的不同而选用四种不同的扩大倍数。图6为第二级扩大电路原理图。
 |
图6:第二级扩大电路原理图 |
调查在引脚F7处的近间隔物体和远间隔物体的信号波形图,经过比照能够看出,因为选用了自动增益选择器,完结F7信号起伏根本相同,确保间隔为3m的物体也能够检测到。
本文小结
经过上面的介绍,咱们能够看出因为GM3101选用了余振屏蔽和自动增益操控器,使得体系功用超过了传统计划,其稳定性也大大加强,一起避免了软件操控中存在的不稳定要素。对倒车雷达生产商来说,不只能下降开发和生产本钱,对整机的可靠性也有了很大进步。所以咱们有理由信任用于倒车雷达测距的单芯片计划会逐渐代替传统的单片机计划。






