


CAN是一种衔接多个操控模块运用的串行异步多主站通讯协议。其间,小于125 Kbps的数据速率一般称为低速CAN。125 Kbps~1 Mbps的数据速率称为高速CAN。CAN在信令处理中运用单线、双线或容错技能。在单线CAN中,数据速率是33.3 Kbps和83.33Kbps,信令选用单端信令。双线CAN数据速率是高速CAN,信令选用差分信令。容错CAN用于低速CAN数据速率。
网络中的每个CAN节点经过发送包方式的信息进行通讯。每个包将包含开支和净荷。依据通讯类型,包称为数据帧、长途帧、过载帧或错帧。对车载网络,CAN节点恳求数据,然后发送一个长途帧。假如节点忙着处理数据、履行优先作业,那么节点将把过载帧放在总线上,标明它现在正忙。假如CAN节点发现有校验和过错或数据损坏,它将发送一个错帧。CAN有两种协议格局:CAN2.OA和CAN2.OB。这两种版别之间的差别是地址中运用的位数不同。CAN2.OA支撑11位地址,能够兼容CAN2.OB。CAN2.OB支撑29位地址,也称为扩展地址。
CAN2.OB的典型数据帧内容如图1所示。

LIN基础知识
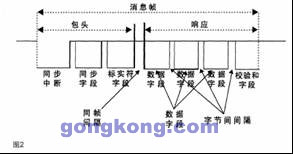
LIN是一种依据公共UART接口的单线串行通讯协议。LIN选用单主站多从站组网结构。它是为轿车传感器和驱动器组网运用开发的,用于车门操控、车灯和车窗操作。LIN主节点将LIN网络与高档网络相连,如运用操控器区域网(CAN)。因为电磁搅扰和时钟同步要求,LIN支撑最大20Kbps的数据速率。在收到和过滤标识符时,从站使命激活,开端传输音讯呼应。呼应由2个、4个或8个数据字节和1个校验和字节组成。包头和呼应部分构成了一个音讯格局。LIN音讯格局如图2所示。
丈量频率振荡器容限和传输推迟,协助处理位守时问题
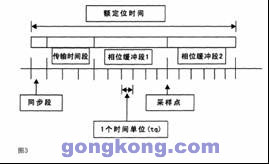
CAN协议的功用、位速率、位采样点和一个位周期中的样点数量都能够由用户编程。在这一过程中,用户有必要知道位守时参数、参阅频率振荡器容限和体系中各种信号传输推迟。依据CAN标准,位时刻分红四段,即同步段、传达时刻段、相位缓冲段1和相位缓冲段2。每个段由能够编程的特定数量的时刻单位组成。时刻单位(tq)是位时刻的根本时刻单位,其长度由编程人员运用位速率预标量界说。图3说明晰怎样才能挑选位时刻中的时刻单位,然后为4个段分配时刻单位。同步段(sync_seg)是估计发生CAN总线电平边缘的位时刻部分。在sync_seg外面发生的边缘与相位段边缘间的间隔称为该边缘的相位差错。传输时刻段(prop_seg)首要用来补偿CAN网络内部的物理延时。相位缓冲段(phasesegl和phase_seg2)包围在样点周围。再一同步跳转宽度(SJW)规则了再同步能够在相位缓冲段规则的规模内把样点移动多远的间隔,以补偿沿到沿差错。
为使CAN网络正常运转,有必要考虑物理延时和频率振荡器的容限规模,CAN网络中的每个节点从自己的频率振荡器中得到位守时,这个位时刻会跟着频率振荡器的容限而改变。在实践体系中,因为初始容限偏置和老化及周围温度改变,频率振荡器参阅频率fclk会违背额外值。这些违背之和得到总的频率振荡器容限。在对守时寄存器编程时,编程人员有必要考虑这一改变。
在DP07000系列上运转的CAN和LIN守时和协议解码软件(称为下DSVNM)主动丈量频率振荡器容限。用户能够指定CAN节点的号码。下DSVNM中的成果将包含有ACK位及没有ACK位的全体频率振荡器容限。TDSVNM还将供给没有ACK位的数据,标明接纳CAN节点对传输节点的影响。经过结合运用频率振荡器的发送节点和接纳节点容限,能够对CAN操控器守时寄存器编程,完成无差错的网络功用。
除频率振荡器容限信息外,为准确地设置样点,还要求传输延时信息。传输推迟在CAN体系中具有重要意义,这是因为CAN支撑在竞赛拜访网络的节点之间进行非损坏性判优及同帧承认。
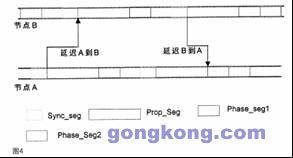
假设有两个CAN节点A和B。两个节点A和B之间的单向传达推迟规则为tprop (A, B)。因为两个节点之间的信号传达时刻,同步到CAN总线上码流的任何CAN节点将与发射机码流不同相。
在图4中的实例中,两个节点A和B都是对CAN总线履行判优的发射机。节点A发送帧开端位的时刻比节点B早不到一个位时刻,因而节点B把自己同步到收到的从隐性到显性的边缘。因为节点B是在发送后同步的这一边缘推迟(A_to_B),因而B的位守时段相对于A发生位移。节点B发送优先权更高的标识符,因而在发送显性位时,在特定标识符上它会赢得判优,而节点A则传输隐性位。节点B发送的显性位将在推迟(B_to_A)后抵达节点A。
因为频率振荡器容限,节点A的样点的实践方位可能会坐落节点A同相的段额外规模内的任何地方,因而节点B传输的位有必要在phase_segl开端前抵达节点A。这一条件界说了prop_seg的长度。
假如节点B传输的从隐性到显性的边缘在phase_seg2开端后抵达节点A,那么可能会发生节点A对隐性位、而不是显性位取样的状况。这会导致误码,并运用过错符号损坏当时帧。
这个问题要求工程师在对CAN操控器的守时寄存器编程时考虑准确的数据。现在TDSVNM软件供给了主动丈量传输推迟的功用。TDSVNM能够主动丈量频率振荡器容限和传输推迟,用户能够运用来自车载网络的实践环境数据对寄存器编程。
CAN和LIN音讯的协议解码
一旦物理层在车载网络中全面运转,固化软件将与ECU(发动机操控单元)集成在一起。在这一活动过程中,用户能够以数据链路层格局检查OSI的物理层活动。图5是典型的车载网络。
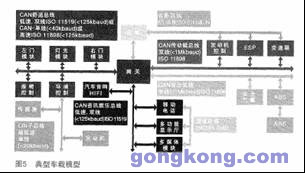
在图5中,多条总线运用网关互连起来。舒适总线和资讯文娱总线一般以低于125 Kbps的速率运转,传动链总线和安全总线以500 Kbps~1 Mbps的数据速率运转。LIN总线接入到舒适总线上。在不同总线之间运用网关交流数据。在这个异构网络中,需求进行的剖析如下:
· 触发特定GAN帧内容,捕获总线事务,以数据链路层格局检查信息
· CAN音讯之间的时戳
· 检定不同网段之间的通讯
· 能够一起检查两个网段中的协议活动。两个网段可所以CAN-CAN或CAN-LIN
· 检定网关的功用,确认网段之间信息交流的时延及信息交流的准确性
经过运用与DP07000系列集成式CAN触发功用接口的TDSVNM软件,用户能够捕获特定CAN帧内容上的CAN事务。TDSVNM处理方案能够监测CAN2.OA或CAN2.0B帧。用户能够灵敏地挑选帧类型,如数据帧、过载帧、长途帧或错帧。依据帧中的内容,用户能够指明要监测的内容,并建议捕获。
可是,选用YT格局捕获的数据很难解说NRZ数据,很难知道CAN音讯中的内容。TDSVNM解码YT波形,以十六进制或二进制格局显现数据,节省了时刻,不会发生人为过错。






