


医学教育是非常重视实践操作的,没有临床实践就不能培养出合格的医师。现代医学人才培养的瓶颈之一便是学生被逼远离了临床实在环境下的操作操练,特别是血管内介入医治这种要求高精确度的手术技能。
为了合作用于介入手术操练的血管介入手术模仿教育体系,自主开发了一套血管介入手术器械运动操控体系。该体系能够将介入手术器械导丝的位移信号发送给上位机,精确描绘上位机软件体系中虚拟导丝的位移,完成同步运动。一同导丝受力反应设备的规划能够模仿导丝在血管中运动时遇到的阻力,供给杰出的手感,到达实在医学操练意图。
0导言
血管类疾病现已成为严重威胁人类生命的疾病之一。现在放射介入疗法对医治此类疾病作用显着,针对传统介入手术医师的操练无法经常在临床环境下进行的问题,国内现已呈现介入手术模仿教育体系用于手术操练。血管介入医治模仿教育体系由介入手术器械运动操控体系和虚拟介入手术软件体系组成,本课题首要对前者进行了研讨,自主规划开发了一种血管介入手术器械运动操控体系。常见的血管介入手术器械有各种类型的导丝、导管、造影器、气囊、支架等。因为导丝在引导导管进入血管和放置支架、球囊等手术器械中起着非常重要的作用,因而本文中论说的介入手术器械以导丝为例。体系由导丝位移信息收集设备和导丝受力模仿设备两部分组成。
1导丝位移信息收集设备
位移收集设备的作用是在进行介入手术模仿时,能够精确收集操练者对导丝的推拉旋转产生的导丝位移信息,然后单片机读取位移信息处理后发送给上位机软件体系。
1.1收集原理
选用光学传感器能够进行无触摸式丈量和收集信息,可是一般光学传感器活络度较小,对收集物体的外表也有很高的要求,对小型精密物体如导管、导丝等的运动信息收集不行精确,所以经过比照,本文运用激光位移传感器芯片ADNS-7530,进行无触摸式丈量,丈量精度、耐用性、灵活性等方面得到了很大的进步。
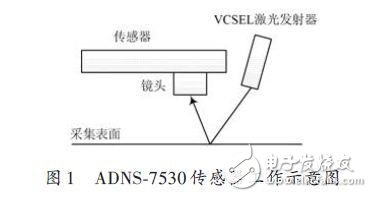
ADNS-7530作业示意图如图1所示。当有物体在镜头收集间隔内移动时,激光发射器VCSEL向物体外表发射激光,经反射后由传感器接纳,经过光学原理获取接连物体外表图画,然后依据前后两张图画改动信息,主动计算出物体外表移动的方向和增量并存储在内部寄存器里。
1.2收集设备
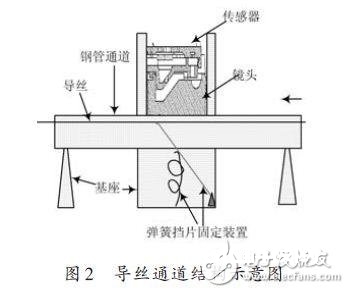
本文规划的导丝通道设备首要由钢管通道、传感器电路板、基座、绷簧挡片固定设备等组成。如图2所示。
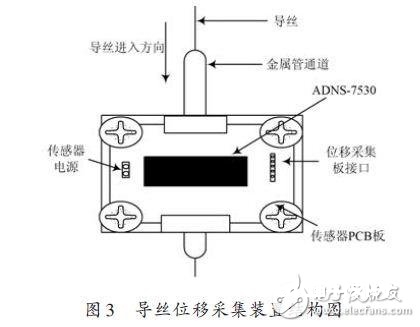
导丝位移信息收集设备如图3所示。ADNS-7530焊接在收集电路板上,电路板固定在基座上,带有凹槽的金属通道在电路板下穿过,电路板上有收集接口和电源接口别离与外部单片机引脚和供电电源衔接。
1.3收集电路规划
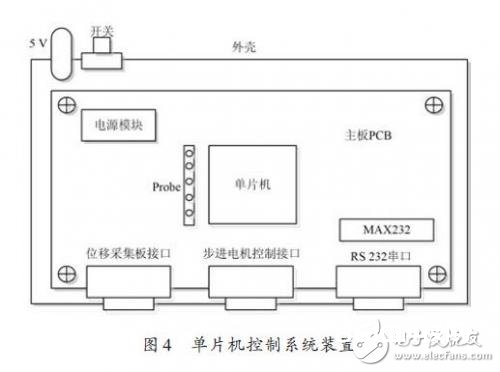
位移信息收集设备中,收集电路首要是ADNS-7530与单片机之间的通讯电路,包含单片机对传感器内的寄存器进行初始化操作,以及读取传感器收集到的导丝实时的位移信息;再便是单片机与上位机软件体系的串口通讯电路,单片机将位移信息处理打包后经过串口发送给上位机。ADNS-7530传感器收集位移信息时,将位移信息以二进制方法存储在了内部寄存器Delta_X_L、Delta_Y_L、Delta_XY_H中,单片机经过SPI方法读取上述寄存器中的位移数据。ADNS-7530要正常作业,精确收集导丝的位移信息,必须先对其内部的寄存器依照必定的次序进行装备。如图4所示。
2导丝受力模仿设备
导丝在血管中移动与血管壁产生磕碰时,行进会遭到阻力,因而,想要愈加逼真地模仿血管内介入医治的进程就要添加力反应,本文自主规划了一个导丝受力模仿设备。该设备的作用是将上位机虚拟手术软件体系中,导丝模型与血管模型产生磕碰后对导丝模型所产生的阻力施加于实在的导丝,模仿实在的手术环境。使操练者感遭到反应力后,及时调整操作动作,然后到达操练的意图。因为导丝在血管中运动只存在单一方向的移动和滚动,具有两个自由度。用一个二维的受力反应设备即可满意要求。为了设备和运用方便,将位移信息收集设备和受力模仿设备一同封装在一个大的塑料盒中,只将金属管通道和一些接口留出,与单片机操控体系设备衔接和通讯。本文规划的导丝受力模仿设备如图5所示。
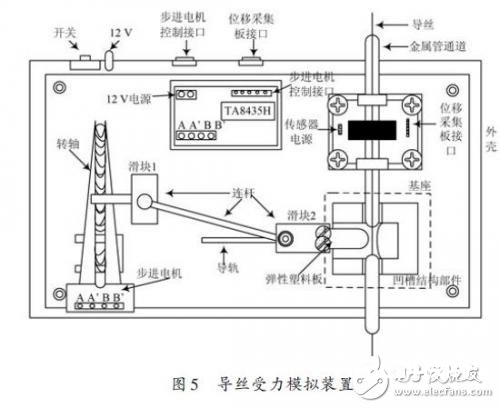
在本设备的规划中传动设备包含转轴、连杆、滑块1和滑块2以及导轨。
滑块1套在转轴上,连杆经过两个螺母将滑块1和滑块2衔接起来,滑块1的运动经过连杆带动嵌在导轨上的滑块2左右运动。力反应设备履行进程是这样的,经过步进电机滚动,带动转轴滚动,然后使转轴上的滑块1向外和向内运动。步进电机正转,滑块1向内运动,带动连杆使其推进滑块2在导轨上向右运动,镶嵌在滑块2上的弹性塑料板向右揉捏穿过凹槽结构的导丝,导丝遭到压力后运动会遭到影响,体现在用手推导丝时有一种阻力感,不同的压力阻力感不同,然后使操作者改动对导丝的操作。步进电机回转则进程相反。
3体系测验
上位机虚拟手术软件体系首要包含依据实在数据进行血管切割、血管建模、导管和导丝建模、支架和气囊建模、磕碰检测等。本体系与上位机虚拟介入手术软件体系衔接后进行测验,测验成果如图6和图7所示。
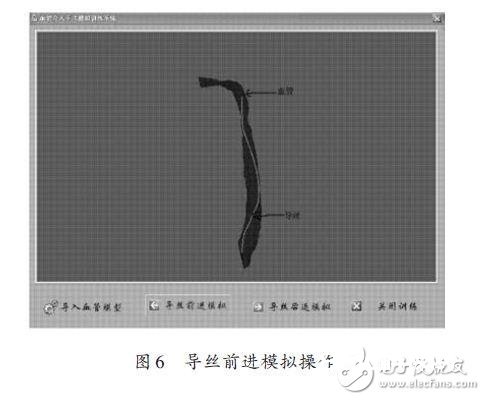
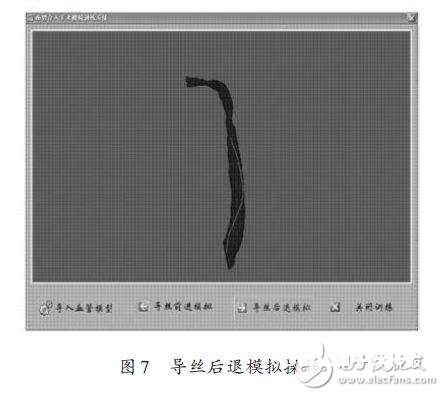
操练者在操作金属管通道里实在的导丝运动时,上位机软件体系中的虚拟导丝能够在虚拟血管里同步运动,产生磕碰后能将磕碰信号发送给单片机处理,给导丝施加对应的压力,然后模仿实在的导丝在血管中运动所遭到的阻力。
体系运转作用根本满意,能够根本满意操练者的操练。当然体系还存在许多需求改善的当地,如添加多个位移收集设备、愈加活络的受力反应设备的规划、愈加美丽的上位机软件界面规划等,以更好的满意今世医学模仿教育的需求。
4结语
本文所论述的血管介入手术器械运动操控体系,为介入手术医师的操练供给了很大的协助。该体系具有必定程度的通用性,今后在对血管介入手术模仿教育体系进行研讨时,能够在本体系的基础上进行进一步的开发,添加和扩展功用,下降研制本钱,缩短开发周期。






