


摘要:文章介绍了弹载伺服安稳渠道功用及操控要求,剖析了渠道操控体系组成及作业原理,说明晰体系中心器材、传感器及伺服电机的选型计划,经过根据TMS320F2812高性能DSP的操控体系硬件、软件规划,完结伺服安稳渠道操控体系规划。实验成果表明,该弹载伺服安稳渠道各项方针满意规划要求,规划办法正确、有用。
0 导言
导弹在飞翔过程中,因为发动机和空气阻力等要素的影响,弹体一直处于剧烈振荡摇晃中。这种扰动不只影响扶引体系的方针视点丈量精度,还影响扶引体系对机动方针的勘探与辨认,乃至导致体系无法截获方针或丢掉盯梢方针。弹载伺服安稳渠道运用渠道台体上装置的速率陀螺丈量台体相对惯性空间的角速度,经过速率陀螺反应构成闭环安稳操控回路,驱动伺服电动机带动渠道运动,完结弹体扰动阻隔,坚持渠道视轴安稳。当视轴与方针方位不一致时,弹载雷达扶引体系测得方针角差错信号,经核算处理后构成渠道盯梢信号,经过伺服电动机带动渠道运动,完结渠道视轴对方针的盯梢。
本项目根据某弹载雷达扶引体系需求,规划一款伺服安稳渠道,经过高性能DSP主控芯片、小型化传感器、微型直流伺服电动机、集成PWM功率扩大芯片的选型剖析及体系硬件、软件规划完结操控体系规划。
1 体系整体计划规划
1.1 体系组成及作业原理
弹载伺服安稳渠道由渠道机械结构和渠道操控体系两部分组成。渠道选用两轴双结构结构方法,渠道操控体系由DSP操控电路、电动机功率驱动电路、伺服电动机、视点传感器、速率陀螺组成。体系组成方框图如图1所示。
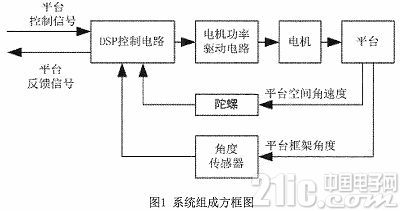
DSP操控电路完结传感器信号收集及、渠道操控算法完结、功率驱动电路PWM操控脉冲波形发生,以及扶引体系核算机操控信号接纳和渠道丈量反应信号发送等功用,电动机功率驱动电路接纳PWM操控脉冲波形并将扩大后信号送至伺服电动机完结电动机驱动功用。伺服电动机作为履行机构,受电动机驱动电路操控,带动渠道完结绕轴滚动。视点传感器丈量渠道结构视点信号,速率陀螺丈量渠道惯性空间角速度。
1. 2 要害器材选型
1.2.1 DSP主控芯片选型
TMS320F2812 DSP芯片根据高性能的32位CPU,指令履行速率高达150MIPS,具有强壮的运算才能和操控功用,片内集成了大容量Flash存储器、高速SRAM 存储器、功用强壮的事情管理器(EV)、高速A/D转化模块、增强型CAN总线通讯模块、SCI串行通讯接口、SPI串行外设接口、多通道缓冲串口、 PLL时钟模块、看门狗、守时器以及多达56个多路复用通用I\O等丰厚、易用的高性能外设单元,适用于自动化设备操控、电动机数字操控、数字伺服体系操控等场合。
1. 2.2 传感器选型
根据本项目所规划伺服安稳渠道应用于弹载雷达扶引体系,因而,对渠道外形尺度及分量要求及其严厉,传感器选型的要害在于器材小型化、轻量化及对弹载运用环境的适应性。
1.2.2.1 视点传感器选型
视点传感器选用旋转电编码器,编码器选用数字SSI输出、分辨率17位、最大转速3500rpm。与电位器、光电编码器、旋转变压器等常用视点传感器比较具有质量轻、惯量小、功耗低、无磁灵敏等许多长处,因为其主体部分(转子、定子)选用组成介质资料制作,因而具有作业温度规模宽、抗湿润、冷凝等长处,适用于弹载环境条件。
1,2.2.2 速率陀螺选型
速率陀螺选用双轴微机械陀螺,陀螺速率规模±400°/s,标度因数非线性度50ppm、发动时间1 s,功耗1.5W,分辨率2-14°/s,全温零位改变5°/h(全温),选用数字RS422串口输出,波特率最高可达1.8Mbits/s。该陀螺首要长处为结构尺度小、质量轻、功耗低、发动快、环境适应性强,适用于弹载环境条件。
1.2.3 伺服电动机选型
电动机选用带行星齿轮减速器的直流伺服电动机,行星齿轮减速器能够在尺度和分量较小的条件下,完结大功率传动,一起,选用内啮合的行星齿轮减速器能够进步空间运用率,兼之其输入输出轴在同一轴线上,所以行星齿轮减速器的径向尺度十分紧凑。电动机电枢电阻157Ω,电感3.4mH,峰值堵转转矩 4.45mNm,空载转速7700r/min,额外电压24V,减速比19:1。
1.2.4 功率驱动芯片选型
考虑本体系电动机驱动需求、驱动操控逻辑及器材性能方针,选用MSK4201型PWM功率扩大芯片作为电动机驱动芯片。MSK4201内部集成了功率场效应管H桥电路,H桥自举驱动与操控电路,最大电源母线电压75V,接连输出电流5A,满意体系功率驱动要求。H桥自举驱动与操控电路包含场效应管驱动、死区时间发生及H桥关断等电路。
2 体系硬件电路规划
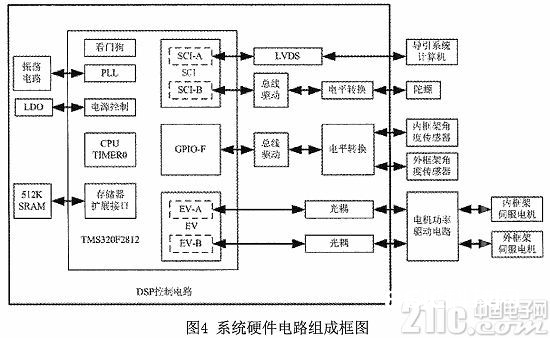
体系硬件电路由DSP操控电路和电动机功率驱动电路组成,其间DSP操控电路包含DSP主控模块、传感器信号收集模块、通讯操控模块等功用模块电路。体系硬件电路组成框图如图4所示。
2.1 DSP操控电路
2.1.1 DSP主控模块
由TMS320F28 1 2、振荡电路、LDO电路、JATG接口电路及外部扩展SRAM电路组成,首要完结DSP作业环境设置及存储空间扩展。规划中选用30MHz石英晶体振荡器供给体系时钟,LDO芯片供给DSP内核及I/O作业电源,片外扩展SRAM存储空间为512K×16bit。
2.1.2 传感器信号收集模块
旋转电编码器选用+5V供电,选用SSI串行通讯接口,通讯时钟频率为0.5~2.5MHz,输入输出信号为Rs-422差分电平。因为TMS320F28 12数字量I\O供电电压为+3.3V,无法直接与旋转电编码器直接衔接,输入输出信号需经总线驱动电路、RS-422电平转化电路改换。规划中选用IDT74LVCH1 64245A双向16位总线驱动芯片和DS26LS31、DS26LS32差分总线驱动、接纳器完结总线驱动与电平转化功用。
双轴微机械陀螺选用+5V供电,选用RS-422串行通讯接口,其输入输出信号也需求经总线驱动电路、RS-422电平转化电路改换。
2.2 电动机功率驱动电路
由光耦阻隔电路、输出使能逻辑操控电路、滤波电路组成。选用HCPL-0630高速光耦完结DSP操控电路与电动机功率驱动电路间的阻隔,运用RC串联滤波电路对MSK4201输出信号进行滤波维护,进步体系电磁兼容性和作业可靠性。
3 体系软件规划
操控体系软件选用模块化规划,首要包含以下程序模块:体系初始化、串口中止、操控算法运算、PWM脉冲波形发生。
3.1 体系程序流程
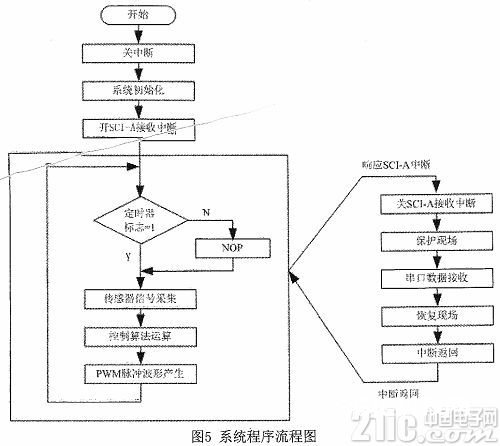
主程序首要完结体系初始化,将SCI串行通讯接口SCI-A设置为FIFO中止接纳方法(用于操控电路与扶引体系核算机串口通讯)、SCI-B设置为状况查询接纳方法(用于陀螺输出信号采样),GPIO-F设置为通用数字量I/O(用于陀螺同步触发、旋转电编码器输出采样及电机确定信号发生),时间管理器 EV-A和EV-B设置为接连增减技能形式(用于PWM脉冲波形发生),软件经过CPUTIMERO守时计数器的守时功用完结算法更新,完结渠道体系闭环操控。
操控体系程序流程图如图5所示。
3.2 数字PID操控算法
PID操控因其算法简略、鲁棒性好和可靠性高级长处被广泛应用于伺服安稳渠道体系操控中。
关于接连体系的PID操控器,其算法表达式如下:
![]()
其间:u(t)是PID操控器的输出,e(t)是给定输入如实践输出之间的误差量,Kp是份额增益,Ki是积分增益,kd是微分增益。
依照接连PID操控算法、以一系列的采样时间点kT代表接连时间t,以矩形法数值积分近似替代积分,以一阶后向差分近似替代微分,可得离散PID表达式为:
![]()
其间,T为采样周期,k为采样序号,k=1,2,…,e(k-1)和e(k)分别为第(k-1)和第k时间误差量。
因为数字PID操控未考虑积分饱满问题,不能直接输出到电动机功率驱动电路,需在PID操控输出之前规划抗积分饱满办法,以避免因为积分项的过度堆集形成体系发生较大超调。
4 体系实验成果
经测验,本项目所规划伺服安稳渠道首要性能方针如下:
阻隔度:对起伏5°、频率1Hz正弦摇摆的阻隔度为43dB;
方位伺服精度:0.2°;
各项方针均满意规划任务书要求。
5 小结
本文经过根据TMS320F2812 DSP的操控电路硬件、软件规划,合作小型、数字输出传感器选型,完结弹载伺服安稳渠道操控体系规划,渠道体系各项方针满意规划要求。本文研究成果关于小型化、数字式弹载伺服安稳渠道操控体系规划具有必定的参考价值。






