


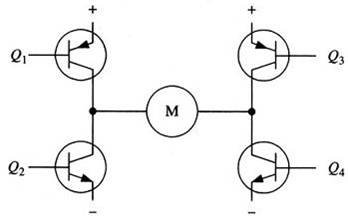
上图中所示为一个典型的直流电机操控电路。电路得名于“H桥驱动电路”是因为它的形状酷似字母H。4个三极管组成H的4条笔直腿,而电机便是H中的横杠(留意:图仅仅示意图,而不是完好的电路图,其间三极管的驱动电路没有画出来)。

H桥式电机驱动电路包含4个三极管和一个电机。要使电机作业,有必要导通对角线上的一对三极管。依据不同三极管对的导通状况,电流可能会从左至右或从右至左流过电机,然后操控电机的转向。
要使电机作业,有必要使对角线上的一对三极管导通。例如,如下图所示,当Q1管和Q4管导通时,电流就从电源正极经Q1从左至右穿过电机,然后再经 Q4回到电源负极。按图中电流箭头所示,该流向的电流将驱动电机顺时针滚动。当三极管Q1和Q4导通时,电流将从左至右流过电机,然后驱动电机按特定方向滚动(电机周围的箭头指示为顺时针方向)。
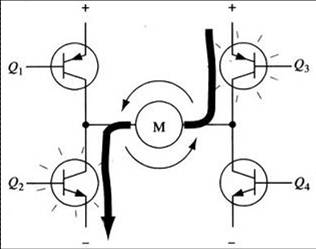
上图所示为另一对三极管Q2和Q3导通的状况,电流将从右至左流过电机。当三极管Q2和Q3导通时,电流将从右至左流过电机,然后驱动电机沿另一方向滚动(电机周围的箭头表明为逆时针方向)。
典型的H桥驱动电路如下:

PWM1为1,PWM2为1时,Q1和Q2导通,节点1和2都是低电平,Q15和Q16导通,电机不作业
PWM1为0,PWM2为0时,Q1和Q2导通,节点1和2都是高电平,Q13和Q14导通,电机不作业
PWM1为1,PWM2为0时,Q1导通而Q2不导通,节点1是低电平而2是高电平,Q14和Q15导通,电机逆时针旋转
PWM1为0,PWM2为1时,Q1不导通而Q2导通,节点1是高电平而2是低电平,Q13和Q16导通,电机顺时针旋转

C言语代码:
功用:能是电机正转,回转,中止。
#include
#define uchar unsigned char
#define uint unsigned int
sbit Key_UP=P3^2;
sbit Key_DOWN=P3^3;
sbit Key_STOP=P3^4;
sbit ZZ=P1^0;
sbit FZ=P1^1;
sbit FMQ=P3^6;
uchar KeyV;
uchar TempKeyV;
void delaynms(uint aa)
{
}
void delay500us(void)
{
}
void beep(void)
{
}
void main(void)
{
}






