


依据MEMS的体系能够明显进步髋关节和膝关节植入体与患者骨骼结构的对准精度,减轻不舒适感,然后防止进行批改手术。
本文将研讨医疗导航运用的共同应战,而且评论或许的处理计划–从传感器机制到体系特性。首要将回忆传感器的一些重要功用指标,以及在传感器选型中应当考虑的潜在差错和漂移机制。本文还会要点介绍经过集成、交融和处理来增强传感器的办法,例如经过选用卡尔曼滤波。但是,在翻开详细论说之前,回忆惯性微机电体系(MEMS)传感器技能的一些根本原理或许会有协助。
1 MEMS根本原理
一度被认为是奇思异想的MEMS技能,现已成为咱们大大都人每天都会碰到的老练技能。它使咱们的轿车愈加安全,增强了手机的可用性,能够丈量和优化东西及运动设备的功用,而且不断进步对住院患者和门诊患者的医疗护理水平。
表1 按运动类型区别的医疗运用

用于线性运动检测的MEMS器材一般是依据一个微加工的多晶硅外表结构,该结构构成于硅晶圆之上,经过多晶硅绷簧悬挂在晶圆的外表上,供给对加速度力的阻力。在加速度下,MEMS轴的偏转由一个差分电容丈量,该差分电容由独立固定板和活动质量衔接板组成。这样,运动使差分电容失衡,导致传感器输出的起伏与加速度成正比。举一个我们了解的比如,
当轿车因为磕碰而忽然急剧减速时,安全气囊传感器中的MEMS轴会发生相同的运动,使得%&&&&&%失衡,终究发生信号触发安全气囊翻开。这一根本加速度计结构,依据不同的运用功用参数进行调整并添加数据处理功用后,能够准确地指示歪斜度、速度乃至方位。还有一种与此不同但技能上相关的结构是陀螺仪,它能检测旋转速率,输出方式为度/秒;加速度计则是检测重力。
2 将运动检测转化为对医疗保健有用的信息
经过一个功耗极低的紧凑器材来准确检测和丈量运动的才能,简直对任何涉及到运动的运用都是有价值的,乃至对那些运动要求不是很要害的运用也是有价值的。表1按运动类型列出了一些根本医疗运用。需求处理更多应战的更高档运用将在稍后评论。
2.1 逾越简略的运动检测
尽管简略的运动检测,例如一个轴上的线性运动,或许很有价值,但大都运用都涉及到多个轴上的多种类型运动。捕捉这种多维运动状况不只能带来新的优点,而且能在轴外扰动或许影响单主轴运动丈量的状况下坚持精度。
许多状况下,为了准确测定方针所阅历的运动,必须将多种类型(例如线性和旋转)的传感器结合起来。例如,加速度计对地球的重力灵敏,能够用来确认倾角。换言之,让一个MEMS加速度计在一个+/-1g重力场中旋转时(+/-90°),它能够将该运动转换为视点表明。但是,加速度计无法区别静态加速度(重力)与动态加速度。这种状况下,加速度计能够与陀螺仪结合,运用组合器材的附加数据处理才能能够分辩线性加速度与歪斜(即当陀螺仪的输出显现旋转与加速度计记载的视在歪斜重合时)。跟着体系的动态程度(运动的轴数和运动自由度)添加,传感器交融进程会变得愈加杂乱。
了解环境对传感器精度的影响也很重要。清楚明了的一个要素是温度,能够对其进行校准;事实上,高精度传感器能够从头校准,而且本身进行动态补偿。另一个不那么明显的考虑要素是潜在的振荡,即便很细微的振荡也会使旋转速率传感器的精度发生偏移,这种效应称为线性加速度效应和振荡校对,其影响或许很严重,详细取决于陀螺仪的质量。在这种状况下,传感器交融相同能够进步功用,即便用加速度计来检测线性加速度,然后运用此信息和陀螺仪线性加速度灵敏度的校准信息进行校对。
许多运用要求多自由度的运动检测。例如,6自由度惯性传感器能够一同检测x、y、z轴上的线性加速度和旋转运动(也称为翻滚、俯仰和偏航),参见图1。
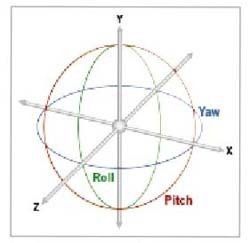
图1 全运动评价所需的6自由度运动丈量:x、y、z轴线性运动和翻滚、俯仰、偏航角速率滚动
惯性传感器在工业中用作辅佐导航器材现已适当广泛。一般,惯性传感器与GPS等其他导航设备一同运用。当GPS拜访不牢靠时,惯性导航能够运用所谓航位核算技能来补偿空地。除了最简略的导航之外,大都处理计划都会依靠多种类型的传感器,在所有条件下供给所需的精度和功用。GPS、光学和磁性检测技能已广为认知,相关产品也很丰厚。但是,每种技能都有其不足之处,即便一同运用,相互之间也不能彻底补偿互相的不准确性。MEMS惯性传感器则有或许彻底补偿传感器的不准确性,因为它不存在上述搅扰,而且不需求外部根底结构:无需卫星、磁场或相机,只需惯性。表2列出了首要的导航传感器技能及其优缺点。
表2 广泛运用的导航传感器及其对医疗导航的适用性
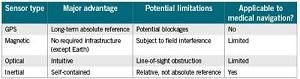
就像车辆导航设备会发生GPS遮挡问题相同,医疗体系所用的光学导航技能也会遇到视野遮挡问题。发生光学遮挡时,惯性传感器能够履行航位核算,然后经过冗余检测增强体系的牢靠性。
2.3 医疗导航
契合表2所列准则的一个医疗运用是在手术室运用惯性传感器,使人工膝关节或髋关节能够与患者共同的骨骼结构更准确地对准。本例的方针是让植入体与患者天然轴的对准差错小于1°。95%以上的全膝关节置换(TKA)手术选用机械对准办法,它所发生的典型差错为3°或更大。运用光学对准的核算机辅佐办法现已开端替代一些机械程序,但或许因为设备开支较大,推行进程缓慢。不管运用机械对准仍是光学对准,这些手术中大约30%都会有未对准的状况(界说为3°以上的差错),使患者感觉不舒服,常常需求进行额定的手术。下降对准差错的或许优点包含:缩短手术时刻、增强患者舒适感以及使关节置换作用更耐久。
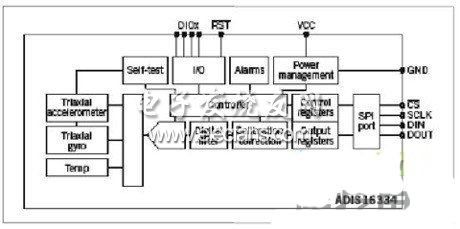
图2 依据MEMS的惯性丈量单元供给6自由度运动丈量, 结构紧凑,合适用于手术仪器
完好多轴惯性丈量单元(IMU)方式的惯性传感器已证明能够明显进步TKA手术的精度。ADIS16334(图2)等器材包含所需的悉数检测功用–三个线性传感器和三个旋转传感器,可替代依据机械和光学的对准技能。该器材运用多种类型的传感器和嵌入式处理来动态校对传感器漂移,如陀螺仪的线性加速度偏移、线性和旋转检测的温度漂移等。经过规范4线串行外设接口(SPI),能够与这个相对杂乱的精细传感器套件轻松接口。
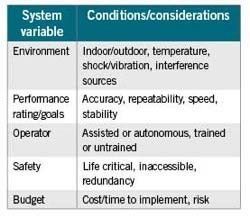
MEMS惯性传感器牢靠度高(轿车行业20年的运用前史证明了这一点),它在手机和视频游戏中的成功运用阐明它在商业上极具吸引力。但是,不同运用对功用的要求大不相同,合适游戏的器材并不能处理本文所述的高功用导航问题。关于导航,重要的MEMS功用指标是偏置漂移、振荡影响、灵敏度和噪声。精细工业和医疗导航所需的功用水平一般比消费电子设备所用MEMS传感器的功用水平高出一个数量级。表3列出了有助于传感器选型的一般体系考虑。
表3 体系方针/约束条件有助于传感器选型
大大都体系都会集成某种方式的卡尔曼滤波器,以便有用兼并多种类型的传感器。卡尔曼滤波器将体系动力学模型、传感器相对精度和其他特定运用的操控输入归入考虑,有用确认最切合实际的运动状况。高精度惯性传感器(低噪声、低漂移、相对温度/时刻/振荡/电源改变坚持稳定)能够下降卡尔曼滤波器的杂乱度,削减所需冗余传感器的数量,以及削减对容许体系工作计划的约束条件数量。
3 医疗MEMS的杂乱性
尽管传感器已完成各式各样的医疗运用,从相对简略的运动捕捉到杂乱的运动剖析,但医用传感器的高功用要求提出了杂乱且涉及到很多核算的规划应战。走运的是,处理这些新一代医疗应战所需的许多原理均依据经工业导航运用验证的办法,包含传感器交融和处理技能。在医疗导航范畴,运动的杂乱性以及精度和牢靠性要求将推进多处理器、附加传感器后处理、杂乱算法、杂乱测验和补偿计划的开展。
.






