


1导言
滑模变结构操控体系是一类特别的变结构操控体系。起特别之处在于,体系的操控不只有切换,并且该切换特功能够迫使体系的状况在切换面上沿预订的轨道作小幅度、高频率的趋近运动-滑动模态运动。这种滑动模态能够规划成与体系的参数及扰动无关。这样,滑模变结构操控无须体系在线辨识就具有很好的鲁棒性。滑模变结构操控近年来已被广泛应用于处理一些杂乱的线性体系、非线性体系、时变、多变量耦合等确定性和不确定性体系,可使体系取得杰出的动态质量[1]。而关于高功能的直流伺服体系,一般要求精度高、无超调、呼应速度快且鲁棒性好。依据主动调理原理规划的惯例PID、PI等操控器,结构简略,规划办法老练,也简略完成,但直流伺服体系中的非线性、参数的时变性和外部扰动等都影响体系的操控功能,很难满意高精度伺服体系的要求。滑模变结构操控的滑动模态对加给体系的搅扰和体系的各种摄动具有彻底自习惯性,所以能彻底满意高精度伺服体系的操控要求[2,4]。
2滑模变结构操控器规划
直流伺服体系的结构框图如图1所示,虽然在大都情况下常把电机的参数当作常数,但实践当转速在大范围内改变时,电机的参数并非常数,而滑模操控正好对参数的改变不太灵敏,故运用这种操控办法来操控电机具有很大的优越性。
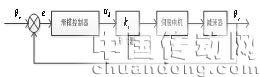
图1直流伺服体系的结构框图
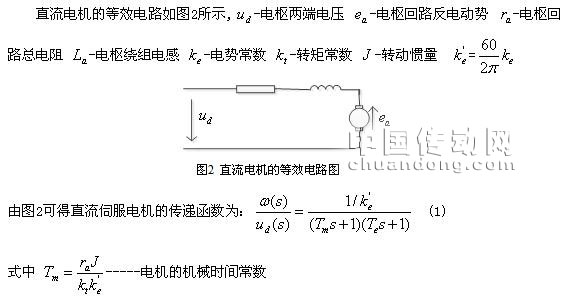
2.1直流伺服体系及其数学模型


针对直流伺服体系中参数时变性和外部扰动等形成的电机模型改变,规划了一种选用滑模变结构操控战略来操控直流伺服电机的办法,并且对体系稳定性进行了剖析。从而,对所规划的滑模变结构操控体系与PID操控做了比照仿真;标明,对具有电机参数大范围摄动的体系,滑模变结构操控体系具有较强的鲁棒性和快速性。
2.2滑模变结构操控的基本问题

2.3切换函数s的选取
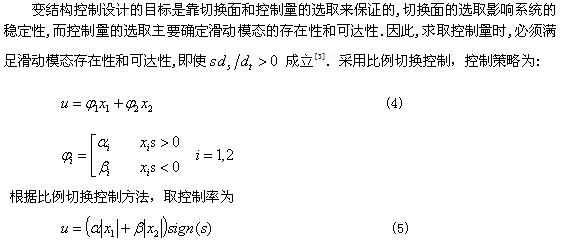
2.4操控量u的求取

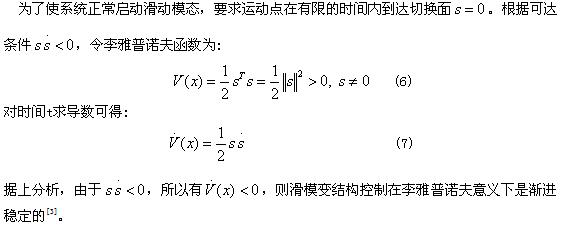
2.5体系稳定性剖析
3仿真与定论

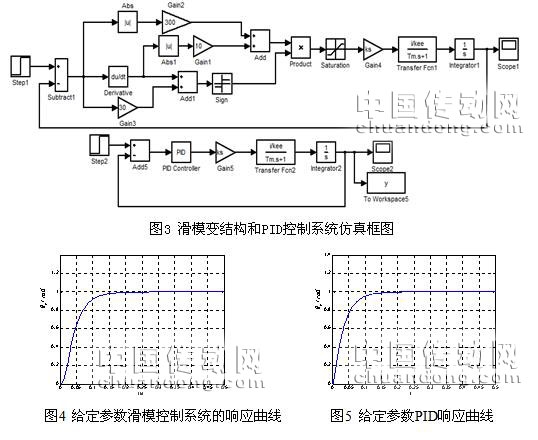
由仿真成果能够看到,明显,当有电机参数大幅摄动时,滑模变结构操控体系能习惯体系参数的改变,呼应时刻很快,很快到达稳态,无超调;而PID产生了大幅度的超调,关于直流伺服电机操控体系而言,超调过大,严重影响加工等进程。
5结束语
本文经过对直流伺服体系剖析,并对其规划了滑模变结构操控战略,规划办法简略,易于完成。从仿真剖析可知,滑模变结构操控优于PID操控,具有较强按捺参数摄动,自习惯强。别的合理地挑选切换函数和操控率参数,滑模变结构操控体系具有快速性好、无超调、无静差的优秀动、静态功能,并且体系参数摄动时,具有很好的鲁棒性。






