


1. 导言
单片机在工业操控范畴运用时不同于民用、商用范畴中的运用,工业操控所在的环境相对比较恶劣,搅扰源多,其常见搅扰源来自现场工业电气在投入、运转、堵截等工况下发生的静电感应、尖峰电压、浪涌电流等搅扰。实践标明,在作业室中按用户要求规划的小型工业采暖操控体系,虽然各项逻辑功用及技术指标的测验都正常,但该体系拿到现场上却不能运用,检测失灵,操作失控,显现花屏等现象接踵而来。经剖析,其搅扰是从现场不同途径传入单片机操控体系的。堵截搅扰源,进步单片机抗搅扰才能是处理操控体系正常作业的条件。
2 抗搅扰办法
2.1 测温信号的抗搅扰
测温电路选用的是单总线芯片DS18B20,该芯片具有测温精度高,衔接线路简略等长处,其测温规模为-55℃到+125℃。适合于采暖体系测温,在实践运用中当温度在 60℃以下时可正常作业,跟着温度的升高,当温度大于 60℃以上时,测温数据开端跳动,且温度越高跳动越剧烈,乃至无法观测。电源加了滤波退偶电路效果不明显,在数据线上并接小电容进行高频旁路时,电容小不起效果,电容大了则数字信号消失。最终经实验在数字电路上加如图 1所示标称值的 RC阻容滤波电路达到了预期效果。

2.2 限位开关信号的抗搅扰
因为限位开关及馈线与 220V沟通负载比较接近,因此,负载发生的沟通强磁场直接对限位开关及馈线发生搅扰。处理的办法选用光电阻隔办法,经过光耦组件 PC827将单片机操控回路与被控回路负载(如电机)阻隔开来。然后大大减小了来自负载回路对单片机发生的搅扰。
2.3 电源回路的抗搅扰
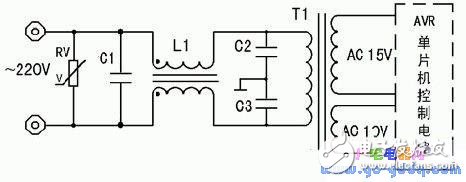
电源搅扰中的尖峰搅扰是一种频频呈现的叠加于电网正弦波上的高能脉冲,其起伏可达几千伏,宽度只要几个毫微秒或几个微秒,按捺办法可从多方面下手。如图 2所示,T1为电源变压器,在其沟通电源的输入端并联压敏电阻RV用来吸收电网瞬间发生的尖峰电压;C1为高频旁路电容,按捺高频差模搅扰,C2和 C3用来按捺高频共模搅扰。电感 L1中两个线圈绕向相同,流过的电流巨细持平,但每一瞬变间的电流方向相反使感生的电磁场方向也相反,故生成的反电势搅扰能够彼此抵消。可有用按捺电源端较低频率的搅扰。
2.4 输出驱动电路的抗搅扰
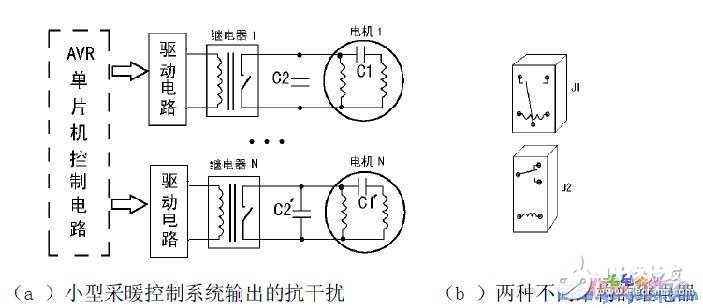
输出驱动选用电磁继电器办法,经过电接点带动沟通电机或直流电磁铁,虽然继电器具有必定的电磁阻隔效果,但沟通电机或电磁铁激磁线圈断开时会发生高压反电势发生串扰。处理的办法如图3(a)所示,在沟通负载如电机两头并接一个高压电容C2,当驱动电路使继电器接点 K断开电机时发生的高压反电势可由并接在电机负载上的电容C2来吸收掉。该电容巨细应适当,一般取所带电机中分相电容 C1的十分之一即可。太小效果不明显,太大则影响分相电容的作业,致使发动力矩太小电机堵转。
别的继电器内部的沟通 220V接点离继电器线圈很近,很简略发生静电搅扰,严峻时会使液晶显现器乱码。实践证明继电器结构不同其抗静电搅扰才能也不同。应尽量挑选继电器线圈与接点间隔较远的为好,如图3(b)中的 J2结构的继电器(JQX14F系列)等。
2.5 液晶显现器的抗搅扰
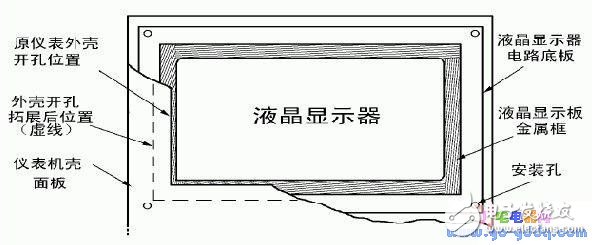
显现电路选用LCD汉字液晶显现。LCD液晶显现与LED数码管显现比较具有信息量大,省电,且衔接线路简略等长处。但液晶显现的一个丧命缺点是抗静电搅扰才能差,在运用中一旦有较强的搅扰信号呈现,显现器就会呈现乱码或花屏。尤其是有汉字的液晶显现器花屏呈现的机率更高。处理的办法是一方面尽量堵截发生静电搅扰的途径,另方面是削减液晶显现器自身发生静电搅扰的条件。其间,后者更为重要。一般液晶显现器在结构上都有固定液晶显现器面板的金属框。如果在装置时该金属框直接触摸外边的固定表盘,构成触摸面,使液晶面板会经过金属框及外面固定的金属表盘之间发生电容效应,因此静电搅扰不可避免。如图 4所示,要削减静电搅扰就必须削减电容效应。详细处理的办法是:将开孔尺度拓宽到图中虚线方位。使得显现器的金属框远离外表机壳,实测成果电容效应简直为零。然后乱码和花屏现象不再呈现。
2.6外部看门狗与外部时钟
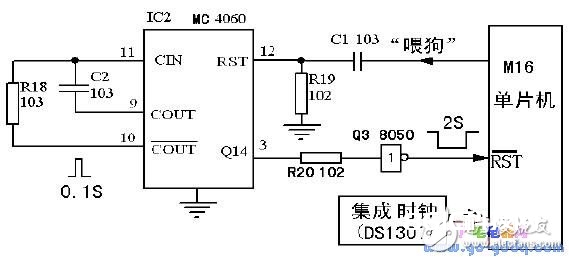
看门狗也称程序监督守时器。虽然 AVR单片机体系内也有该功用的设置,但在运用实践中发现当搅扰严峻时该功用会失效,即体系死机后单片机内部的看门狗也无法复位。故有必要在单片机外部独自规划看门狗电路。如图 5所示,由 MC4060芯片及外围电路构成一个看门狗电路。MC4060是一个带外接振动的 14分频守时计数器,R18和 C2时刻常数决议振动频率。选用如图 5所示的参数时,该振动频率经过 2秒左右时刻后 14分频计数器将被记满,Q14由低电平变高电平经三极管 Q3构成的反相器使输出变为低电平,M16单片机被复位。程序正常运转时,会在规则的时刻以内(2S左右)由程序向看门狗 MC4060芯片及时发清零(喂狗)信号,使守时计数器还没有记满就被铲除,故不会发生复位信号;当程序“跑飞”时,看门狗便不能在规则的时刻内得到铲除(喂狗)信号,则看门狗将使 M16单片机复位使程序重新开端作业。
为合作看门狗在操控器死机后的复位作业,如图 5所示操控器的体系时钟由外部的时钟专用集成电路DS1307供给,AVR单片机内部时钟资源仅对程序中的延时变量供给相对时刻。这样的优点是当看门狗一旦使体系复位,AVR内部时钟必定要清零,而外部体系时钟不会被清零,不影响操控器守时发动或守时中止等项功用的施行。别的,外部时钟 DS1307芯片耗电极省仅需 0.5微安,而内部时钟即便在省电形式下也需求几毫安以上。若用小型 20mAh容量锂电作电源后备,掉电后外部专用时钟可在几年内信息不丢,而内部时钟不到一天就没电了。
3.结束语
在规划开发AVR单片机在工业操控体系中的运用中,抗搅扰是一个不能绕过去的实际课题。要处理该课题,了解常用的抗搅扰办法是一个重要条件。但因为搅扰要素多,操控目标及所要求的操控功用不尽相同,所以抗搅扰办法并没有固定形式,只能在实践中经过不断探索来挑选更合理更有用的计划。本文所述的抗搅扰办法是一点实践经验的总结,供参阅。
本文立异点:1.在 DS18B20数据线上接阻容电路;2.在电源的输入端并联压敏电阻以吸收尖峰电压;3.加大液晶显现器开孔尺度以削减它自身发生静电搅扰。






