


电源发动进程中瞬时电流冲击很大, 对电源和器材的使用寿命有很严重的影响, 选用杰出的操控办法对发动电流进行操控以减小其损害, 使发动进程中无瞬间冲击且能接连改变, 是电源发动操控中要害的一步。电源软发动办法便是操控输出电压和电流, 使负载的电压和电流渐增。关于线性时不变模型的被控目标恰当整定PID 参数可获得较满意的操控作用, 可以很好地处理电流过大的问题。PID 操控能很好地处理发动进程中震动和超调的问题, 可以更好地维护电源, 且发动牢靠、安稳性强。选用单片机作为操控器, 编程灵敏、性价比较高, 易完结人机界面办理。使用软件调整体系的非线性, 以下降实测值与设定值之间的差错。电源电压或电流的动摇、电路元件的老化、环境温度等要素都将影响电源的安稳性。为了安稳地操控电源功率, 该计划选用依据单片机的高速AD、DA 数据收集体系, 并选用PID算法完结大功率电源的软发动, 体系选用PID 电压采样反应操控输出电流的安稳不变, 精度较高、响应速度较快、灵敏性较好、安稳性较高。
1 大功率精细恒流源的完结
1.1 电源体系规划
以单片机为中心, 完结以下功用: 处理键盘输入数值, 包含电路预订值和+ 、- 步进; 操控数LCD 显现预订值和实践值; 操控ADC 和DAC; 依据得到的反应信号经进程序操控算法进行差错值补偿。因为运放OPA549 一路受D/A 转化器操控, 调整运放OPA549 输入端电压, 一路为份额扩大电路。当DAC 输出预订值或步进值后, 电流源的输出在0 ~8 A 规模内改变。输出电压经与负载串联的小电阻采样后, 送入ADC, 采样值与预订值在单片机内部进行核算、比较输出操控信号,对差错值进行补偿。使用软件调整体系的非线性, 以下降实测值与设定值之间的差错。
1.2 电源电路规划
(1) 数控部分中心
选用单C8051F , 操控数控直流源的键盘和显现, 与D/A 转化器和A/D 转化器操控输出电流。A/D 转化器的基准电压由专门±9 V 电源供电,D/A 转化器的基准电压由+20 V 电源供电, 由单片机送出数据经DAC 转化输出操控电压。
(2) 运放OPA549 扩大电路电流源。
OPA549 是BB 公司新推出的一种高电压大电流功率运算扩大器。它可以供给极好的低电平信号、输出高电压、大电流, 可驱动各种负载。该器材的首要特点: 输出电流大, 接连输出电流可达8 A, 峰值电流可达10 A; 作业电压规模宽, 单电源为+8 V~+60 V, 双电源为±4 V~±60 V; 输出电压摇摆大;有过热封闭功用, 电流极限可调; 有使能及制止功用; 有过热封闭指示; 转化功率( 压摆率) 最高为9 V/μs ; 作业温度规模为-40℃~+85℃。该器材首要使用于驱动工业设备、测验设备、电源、音频功率扩大器等大电流负载。
在该电源体系中, 首要为负载供给大电流, 选用PID 操控算法操控负载的发光强度。输入为单片机经DAC输出的操控电压, 一路为份额扩大电路, 如图1 所示增益G=1+R3/R2.电流型DAC 通过R1 转化成电压, 操控OPA549 .输出电流经采样电阻转化为采样电压, 送入A/D 转化器反应至单片机进行差错值补偿。
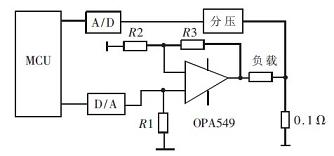
图1 OPA549 构成可调大电流恒流源
(3) 散热及抗搅扰。
OPA549 大功率管作业时发生安稳的大电流, 功耗较大, 发生的热量较多, 散热成为该电源急需处理的问题。一般的轴流电扇内部电机置有脉冲驱动电路, 驱动时, 脉冲成分很简略直接顺电机电源线 外溢 , 搅扰其他电器设备。视频设备上搅扰表现为横通斜线, 音响设备上发生噪音。为此, 装置大面积的铜散热片, 一起用电扇对设备中的电子元器材强制散热。装置电扇时, 需求在电扇电机电源线上串绕一只高频磁环以抗搅扰。串绕磁环有用滤除这些搅扰成分, 一般只需绕上1~3 匝即可。
2 PID 操控算法
体系软发动的操控功用通过份额积分微分操控器完结。通过比较给定信号与反应信号的差错, 并进行份额、积分、微分等运算进行操控, 是技能较老练、使用、广泛的一种操控办法。其结构简略、灵敏性强、体系参数调整便利, 不需求求出模型。
PID 操控原理如图2 所示。PID 操控是一种线性调理器, 它把设定值W 与实践输出值相减, 得到操控差错e .差错值e 经份额、积分、微分后通过线性组合构成操控量U, 对目标进行操控。其间份额调理器起到根底调理作用, 首要对操控体系的灵敏度和操控速度有影响。积分调理器可以主动调理操控量, 消除稳态差错,使体系趋于安稳。微分调理器可以减小超调, 战胜振动, 一起加速体系的安稳速度, 缩短调整时刻, 然后改进体系的动态功用。
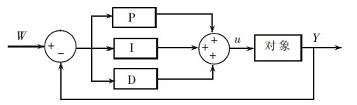
图2 PID 操控原理图
PID 操控器的输出与输入之间的联系可表达为:
式中: Ti为积分时刻常数; Td为微分时刻常数; Kp为份额系数; Ki为积分常数, Ki=Kp/Ti ; Kd为微分常数,Kd=Kp/Td.
体系发动时刻较短, 发动电压、电流较大, 负载所接受的冲击也较大, 致使发动阶段负载的动负荷峰值远远大于正常运行时的负荷, 简略形成负载的损坏。为处理此问题, 规划了一种新式的PID 操控软发动电源体系, 首要由电源、大电流恒流源、输出大电流端采样和操控体系组成, 并完结了试验室内的试验。当电源发动时, 首先由单片机体系给定设定电压、电流或功率。PID软发动是按负载线性上升的规则操控输出。在负载电压线性添加的进程中, 假如电流超出了所限制的规模, 则立刻投入电压闭环, 使电流值限制在所设定的规模内后, 再线性逐步添加电压至额定值, 体系的光强也由零逐步增大, 完结发动进程。
PID 操控体系软发动作用图如图3 所示。通过串行通讯端口com1 通讯, 电压单位mV、电流单位mA, 功率单位mW, 时刻单位s.
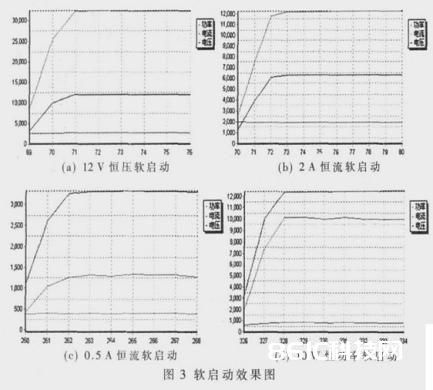
从图3 的软发动作用图可以看出, 在安稳电压、电流、功率的形式下作业时, 体系开机进程超调量很小, 有用地操控了发动进程, 避免了发动进程发生过大的扰动电压, 发生过大的功率,有用地维护了负载。
3 试验成果
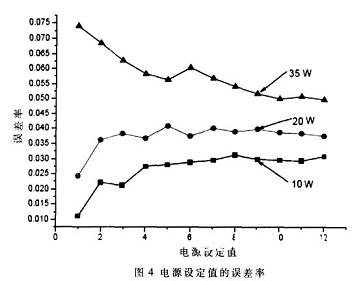
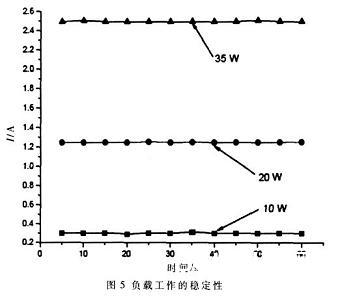
因为输出电流到达8 A, 对电源的功率要求较高, 易发生噪声, 这种随机噪声也会对输出电流发生必定的影响。为削弱这种噪声, 各个模块别离供电, 以削减穿插搅扰, 一起在电路板上多加装去耦滤波%&&&&&%, 减小搅扰的影响, 一起OPA549 能有用地按捺纹波。影响电源安稳性的要素许多, 如负载的改变、取样电阻的改变、A/D、D/A 的影响等。如图4 所示, 不同负载的情况下, 电源差错不同。10 W 的负载, 因为功率较低, 在电压、电流添加时, 差错改变也较小。35 W 的负载, 因为功率较大, 作业电流的改变规模比较大, 功耗较大, 电源的差错改变相应地也比较大。如图5, 在10 W、20 W 和35 W 的负载时, 作业状况安稳, 可以满意大电流、大功率的需求。
该体系使用PID 算法进行操控, 选用大功率运放OPA549 输出电流在0~8 A 规模内可调, 最大峰值可到达10 A, 可以有用按捺纹波电流, 战胜了传统电流源输出电流规模小的缺陷。可设置并能实时显现输出电压、电流、功率实测值, 具有+ , – 步进调整功用, 输出可在LCD12864 显现, 一起通过RS232 与上位机同步通讯, 直接显现, 保存试验数据。通过对测验成果的剖析,体系在软发动的进程中, 超调量很小, 发动作用很好, 避免了对负载的冲击。因为大功率调整管的电流大规模改变时, 通过软件补偿、扩大电路调整等办法处理线性度较差,实测值和设定值存在差错的问题。该电源适用于大功率的场合,本电源具有很好的实用性。






