


装上轿车的小型激光雷达有哪些使用?装在哪里?线数到底有什么差异?
周六上海交大校庆,在四川闲逛的时分,日笃小站的科普文《激光雷达(LiDAR)及技能现状》引来剧兄(Ibeo我国出售总监北京欧百拓信息科技发展有限公司CEO剧学铭)讲了一下Lidar激光雷达的各式各样,我挑其间的几个方面来说。
1)车载Lidar的前史和现在使用状况。
2)车载Lidar的装置和一些根本需求。
3)1、4、8、16、32、64线Lidar比照。
车载Lidar前史与使用
前史
车载Lidar的代表的德国Ibeo,首要以Ibeo为例整理一下前史。
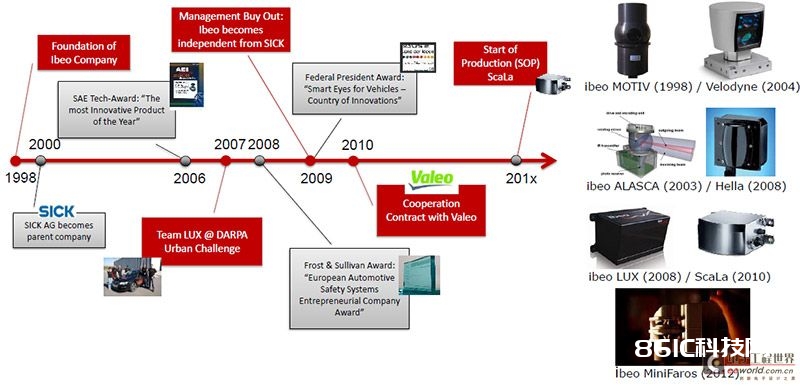
公司前史:IBEO1998树立(德国汉堡)→2000年S%&&&&&%K独立部分→2009金融危机自立门户→2015进入我国
1995年产品测验(First Tests with Ibeo Laserscanner)
Gen1:1998 MOTIV 机械内部结构【=Velodyne】
Gen2:2003 ALASCA 45度镜面【=hella规划】
Gen3:2008 Lux是旋转镜面测向光源经典车载
Gen4:Mini自用
使用

这个图其实是欧盟赞助项目Minifaros研讨时分做的剖析,Minifaros首要方针是翻开小型车和中型车的ADAS商场,经过研讨一种低本钱、低功耗的小型激光雷达,拓宽一下使用的可能性。
项目针对不同的ADAS的功用进行了评价,首要从追寻和辨认的两个维度来剖析Lidar的使用范围,Lidar需求重视的参数用绿框标出。

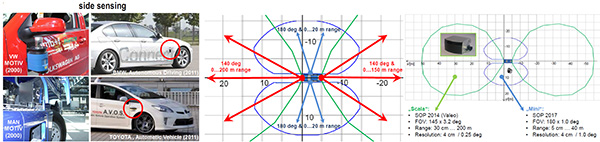
其间关于长短距的差异,
短距(Short Range Lidar):【3线】这种首要是只测车的信息,并不重视对路面和环境信息收集。
长距(Long Range Lidar):【4\8\16\32\64线】首要别离丈量路面和环境信息,这儿分2.5D和3D两种。2.5D代表是Ibeo 2.5D,考究“精”,用最有用的计划提取最有用信息。3D代表是velodyne 3D,更多是环境树立,考究“全”,继续反应。
在欧盟的敞开项目里边,Minifaros研讨的是下面这个Lidar产品:

车载Lidar的装置
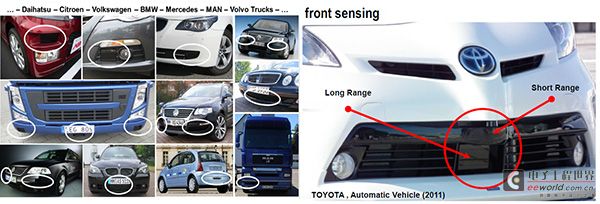
一般2.5D的长距Lidar的装置方位,是在高于地上40公分左右 这些方位也是最易装置,考虑有用性。
前向收集:都是在进气格栅处左右40cm左右。
侧向收集:2013年开端,IBEO规划的SACLA 同Valeo协作,开端向量产跨进,到现在为止已经在奥迪、宝马等多家车厂内进行了内部测验,估计2017年量产,这个Lidar比幻想的量产时刻来得长,之前的许多当地都是2014年的数据。
不同线数的Lidar比较
剧兄的比照首要是依据IBEO的开发经历而来的,1、4、8、16、32、64线雷达都开发过。
价格维度
前面说了,你要收集3D仍是2.5D,这儿就涉及到一个本钱和效益问题了,如下图所示。
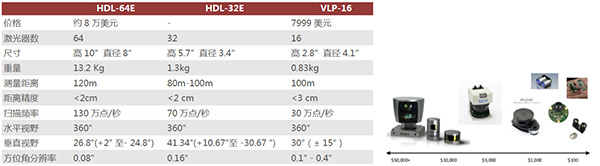
技能维度
1)单线激光雷达首要在工业范畴,这样是其体积较大的原因,而在车载使用方面存在一个缺点,无法获取路面信息,单线雷达获取的数据为2D数据,无法差异方针的高度等信息。
2)4线雷达的笔直视角为3.2°,能够理解为2.5D数据,能够判别障碍物的高度,处理地上的信息。
3)8线雷达:主机厂期望一起探测到弯角路崖等信息,也便是需求更大的笔直视角,所以扩大四线雷达。
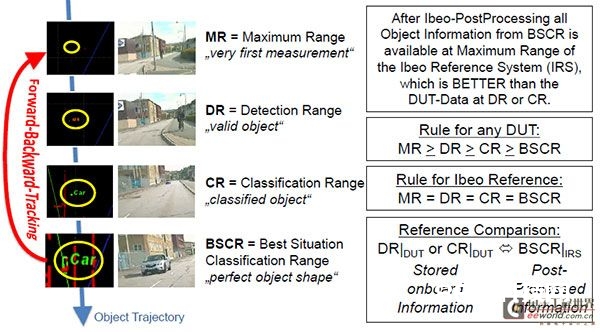
从某种程度上来说,Lidar也是一个信息量很丰厚的信息收集体系,如下图所示,能够差异。

最大测距:初次采样看到黄圈那部分(左上图)。
检测间隔:有用物体检测的状况(右上)。
分类间隔:把车辆还有其他物体经过信息别离的(左下)。
最佳分类间隔:能够别离预备度最高和有用的间隔(右下)。
剧兄反复强调的算法,如图所示,首要是德国工程师将硬件里边做了很多的处理,能够更好的协助使用。这些资料CEO在各地处处show,都当宝物啊。
小结
1)激光雷达Lidar比幻想的还要杂乱一些,经剧兄一提点嘛,我也知道该下一步总结和提炼资料了。
2)国内的朋友要尽力啊,这不是你提一个你能做就能做的东西,光是德国人量产就搞了7年,光学、电子、软件还有环境实验和路途实验,哪个环节都不能缺,还有Tier1和整车企业的支撑,路途困难保重哈。
3)ADAS高阶的比咱们幻想的难一些,假如只看美国创业企业忽悠,这个100美金,这个50美金,车开出去是要出问题的。
参阅文件
1)Ibeo Automotive Systems GmbH
2)2012 10 Sensors for Vehicle Automation:Are We There Yet?
3)2015 10 ChallengesandApproachesforDevelopment andEvaluation of Automated Vehicle Systems
4)Laserscanner-based lane detection and relative positioning
这些参阅文件都是出自CEO在各个场合做的,所以便是最大的出售啊。最终我个人表明对这位德国的博士表明敬意,我个人觉得读了博士做技能做到CEO,在国内如同很不实际。






