


1.项目概述
1.1 项目布景
跟着轿车的遍及和高速公路的兴修,轿车的自动安全功用遭到人们越来越多的重视,安全辅佐驾驭已成为世界智能交通体系研讨的重要内容。但是,研讨标明,在驾驭员–轿车–路途3个环节中,驾驭员是可靠性最差的一个环节,80%以上的交通事故来自于驾驭员的过错。据统计,其间约有44%的交通事故与车辆行进违背正常车道有关,其首要原因是驾驭员注意力不会集或许疲惫驾驭,形成车辆的无意识违背。针对此状况,行车过程中的车道检测及报警的研讨,遭到了世界各国的高度重视。
1.2 体系功用及项目方针
体系的首要功用分为下面五个部分:
(1)经过摄像机获取车道信息,即视频帧图画
(2)对得到的视频帧图画进行预处理
(3)对预处理后的图画进行边际提取,取得车道标识
(4)依据车道标识进行离道评价
(5)依据评价成果做出相应报警办法
体系的要求及方针:
(1)体系的一切功用和算法都运用FPGA完结
(2)体系能满意实时处理要求,到达体系的实用性
2.项目计划
2.1 功用模块
从功用上,车道违背报警体系可分为4个功用模块,分别是:车道辨认预处理(Preprocessing)、车道模型判别(Mode Selection)、车道辨认(Lane Detection)和路途违背判别(Warning),选用例图表明体系功用,如图一所示。

图(一)车道违背报警体系结构图
1. 车道辨认预处理模块
车道辨认预处理模块是整个体系的根底,车道边际特征点提取模块首要包含一些预处理的滑润算法,依据灰度阈值切割的车道外边际检测和车道图画的二值化处理。
2. 车道判别模块
车道判别模块,依据路途的先验常识,经过直线或许曲线模型来确认车道线,将车道检测转化为确认数学模型的参数。车道模型分为直线模型,曲线模型和组合模型三种。
3. 车道检测模块
车道检测指在没有路途先验信息条件下,确认车道标志线的方位,用直线或许曲线拟合车道特征点,得到车道线的数学模型,用于车道违背预警的判别。
4. 路途违背模块
路途违背模块依据车道检测模块得到的数据,使用车道违背正告规范进行车道违背判别,依据判别的成果和给定的阈值比较,做出相应正告。
从用例图中能够看出这四个模块的相互关系,在图画预处理模块和车道模型挑选模块的根底上,发动车道检测模块。预警模块则依赖于车道检测模块,依据车道检测的参数,判别是否预警。
2.2 处理流程
该体系的流程图如图二所示:
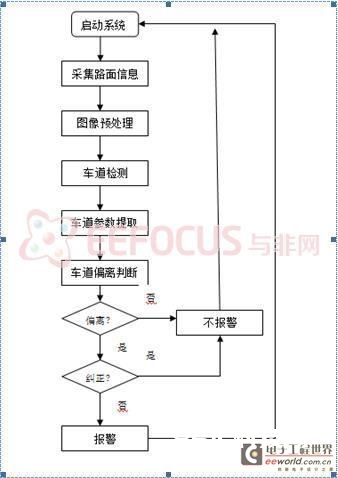
图(二)车道违背报警体系流程图
1.视频图画收集
依据摄像头的装置方位,摄像头能够分为侧视摄像(摄像头装置在车辆旁边面)和前视摄像(摄像头装置在车辆前部,斜指向车辆的前方),本体系中选用前视摄像方法。
2.图画预处理
图画在收集过程中,因为路面存在斜度,障碍物,车道在远方还有天空等信息,这些信息具有很强的搅扰性,因而捕取得到的车道不能直接用于车道检测。需求经过一些图画初始化,挑选感兴趣的区域,以削减搅扰和进步核算功用。为了消除噪音的影响还要做低通滤波,最终还要选用使用阈值对图画进行二值化切割,以获取更为明晰的车道线,简化了车道线检测。
3.车道检测
车道检测指在没有路途先验信息条件下,确认车道标志线的位值,用直线或许曲线拟合车道特征点,得到车道线的数学模型,用于车道违背预警的判别。车道的视频图画具有连续性,车道线不会产生骤变,因而,关于车道特征不明的单帧图画,能够引进前一帧图画的车道模型参数,进步检测的精度。一起,在前一帧车道线周围设置感兴趣区域,缩小检测规模,进步检测速度。
4.车道违背判别
车道违背判别的正告规范能够分为四种,依据车辆在车道中的当时方位,依据将来偏移量的不同,依据车辆将横越车道鸿沟的时刻,依据常识的路途场景感知。
2.3 硬件架构
本规划选用Xilinx公司的Nexys 3 Spartan-6 FPGA Board开发板,使用其上的Xilinx Spartan®-6 FPGA (XC6LX16-CS324) 的大容量逻辑资源完结各个模块。依据2.2节中的处理流程,体系应该包含以下模块:视频数据提取模块,预处理模块,车道检测模块,车道违背模块,全体的硬件架构如图三所示:

图(三)硬件架构图
视频数据提取模块杂乱提取车道视频图画,并经过USB操控单元将视频帧传输到预处理模块。在预处理模块对视频帧图画进行加强,得到车道与布景切割的二值化图画。在车道检测模块中将二值化图画的中的车道进行拟合,得到明晰安稳的车道信息。最终依据车道的信息参数,判别轿车离道。






