


摘要:介绍了无人机载光电使命设备升降组织的作业原理、结构组成及其操控器规划。操控器选用C8051F320单片机,驱动电路选用高集成度、高性价比、高牢靠性和高效率的驱动芯片MSK4310完结。与传统分立元件办法比较,简化了80%的电路规划,节省了50%的结构尺度。体系完结了光电使命设备的自主升降以及到位中止等主动操控功用。
确保了无人机在起飞、下降时其所装备光电使命设备的安全性。
无人机载光电使命设备升降组织是为了完结光电使命设备在特定空域自主升降而规划的。当无人机在巡航时,升降组织将光电设备降至适宜的方位,确保其查找、勘探、识
别、盯梢等功用的无障碍完结;当无人机在起飞和下降时,升降组织将光电设备升至无人机舱段内的安全方位,使其在遭到较大冲击时,免受损坏,确保其安全性;一起,当无人机不运用光电设备时,升降组织将其升起至机舱舱段内,也能够确保无人机飞行时的机体空气动力学特性。因而,升降组织的牢靠正常作业是光电使命设备完结使命使命和安全运用的条件,基于此,要求升降组织及其操控器安全系数高、牢靠性好,一起为满意无人机装载条件,要求体积分量小。
1 升降组织简介
升降组织为无人机载产品,组织完结遵从简捷、适用、分量轻、体积小等准则,确保升降运动平稳自若、牢靠安全。组织具有限位功用,在升降的恣意方位有杰出的自锁功用。本文所操控的升降组织如图1所示,挑选行星轮同步带升降组织规划,升降组织由升降渠道和操控盒两部分组成,操控盒置于渠道外侧。升降渠道由三个薄壁结构、四根光杆及四根丝杠组成全体结构。其间第一层、第三层薄壁结构是固定结构,这两层结构经过光杆及丝杠连接起来,支撑起整个升降渠道,两层结构上均开有孔洞,确保光电设备的无障碍升降运动。第二层薄壁结构是活动结构,光电设备经过装置螺栓固定在该层结构上,用电机经过同步齿形带带动丝杠滚动唆使活动结构上下运动来到达升降光电设备的意图。

2 操控器作业原理
操控器以单片机C8051F320为升降组织主控芯片,结合芯片MSK4310的功率放大作用,合作限位开关完结定点升降功用。
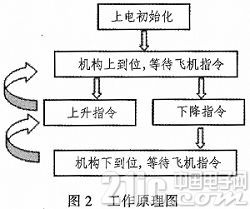
升降组织的作业原理是:当体系上电,升降组织初始化,上升至顶位,等候飞机发送操控指令。当飞机给出操控信号,体系主动判别上升或许下降。一起判别是否上到位或许下到位。到位后,给飞机回来到位指令。作业原理见图2。
3 操控器硬件规划
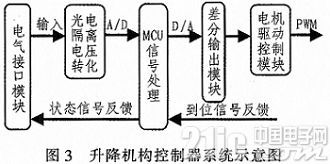
升降组织操控器首要由C8051单片机和MSK公司出产的驱动芯片MSK4310组成,首要包含电气接口部分、光电阻隔部分、数字信号处理模块、差分输出模块、电机驱动操控模块。飞机操控信号经过光耦器材PS2805转化为单片机I/O口能够承受的3.3 V,单片机对输入的数据进行算法处理,经过差分输出模块得到差分电压信号给电机驱动操控模块,生成相应PWM波输出给电机。整个体系如图3所示。
3.1 光电阻隔
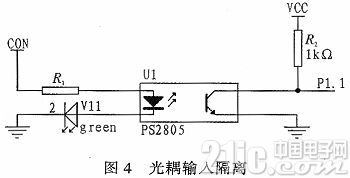
操控器在数字信号输入级用到了光电阻隔技能。在输入级,因为单片机接纳的操控信号为3.3 V,为了防止飞机给的高电压操控信号CON损坏单片机I/O口,两级之间参加光耦PS2805芯片,详细如图4所示。
3.2 数字信号处理模块
操控器数字信号处理模块是以单片机C8051F320为主处理芯片MCU,实时收集飞控信号、到位信号等进行数据处理。单片机内集成了17通道模仿多路挑选器(AMUX0)和1个200 ksps的10位逐次迫临寄存器型ADC,ADC中集成了盯梢坚持电路和可编程窗口检测器。MCU接纳到操控信号凹凸电平常,P1.2口和P1.3口输出相反电平,经过两片LM193比较器进行电压比较,构成差分输出电压信号,比较器后级接上拉电阻进步输出驱动才能。
3.3 电机驱动操控模块
传统分立元件MOSFET建立三相桥电路,不光结构尺度较大,简单呈现信号波形失真等状况,并且其外围驱动电路杂乱,还需参加硬件 HALL解码或许在MCU内参加软件HALL解码。与其比较,MSK公司的驱动芯片MSK4310集成波形发生器电路、门驱动电路、HALL解码电路、限流维护电路、速度环于一体,其结构紧凑、价格低廉、集成度高、牢靠性好。电机驱动外围电路如图5所示。
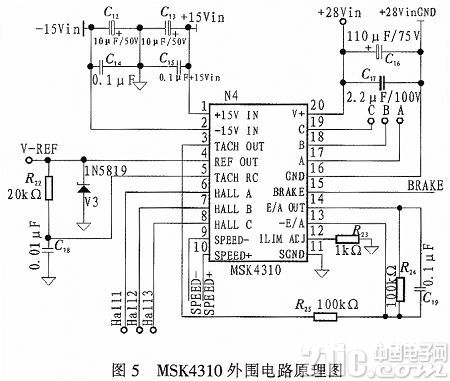
选用三相无刷直流电机为升降履行元件,经过接纳A、B、C三相PWM波唆使电机正转或许回转,到达使负载上升下降的意图。电机选用制动器制动,制动器正常作业电压为+24 V,当制动器掉电,电机呈现抱死状况。体系在高速运转中忽然呈现电机抱死状况,会呈现硬力磕碰,然后损伤电机、损坏组织。为了防止上述状况,体系选用软刹车功用,当CPU判别到位时。先由CPU送BRAKE刹车信号给功率放大模块,电机减速至中止,待电机中止之后,制动器断电,电机紧紧抱死,设备被精确定位。选用这种操控战略,简单操控,安全性好,牢靠性高。
4 操控器软件规划
软件选用C言语进行模块化结构规划,主程序由时钟初始化、I/O口初始化和主函数等构成。本着简化程序杂乱度,进步程序牢靠度的准则,对程序源代码进行了一层层的
优化。
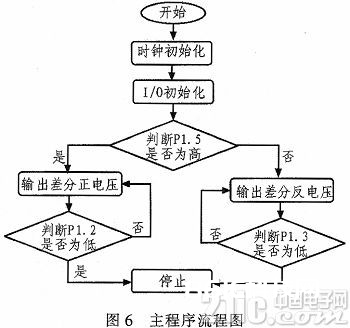
上电进行时钟、I/O初始化,判别单片机P1.5口是否为高电平,若为高阐明收到上升指令,电机上升,然后判别单片机P1.2口是否为低电平,若为低阐明现已上到位,然后中止。反之亦然。图6为体系程序流程图。
5 试验成果及定论
在室温、负载25kg条件下,完结300次升降,记载30组数据,如图7所示。
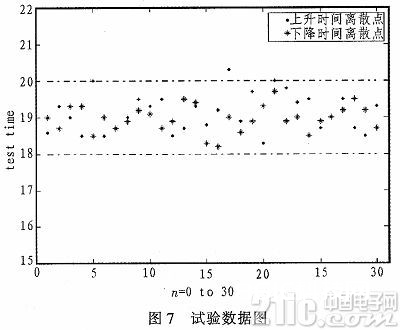
体系要求升降组织上升时刻和下降时刻小于等于20秒,经过试验成果能够看出,组织运转时刻精确性高,能够精确完结体系的使命要求。一起组织功能安稳,上升下降平稳,操控器发热量小。到达了预期的操控作用。操控器具有如下特色:
1)升降组织操控器选用MCU进行数字信号处理。单片机C8051成熟度高、牢靠性好。
2)功率放大部分选用了集成度更高的MSK4310,与传统分立元件比较,集成度更高、抗干扰才能更强、操控更简单、结构尺度更小。
3)体系升降速率能够经过调整差分输出模块的特定电阻阻值调理分压,进行无极线性调理,调理规模为1 V到5 V,操作便利。
6 定论
经过试验验证,升降组织的行星轮同步带规划确保了设备升降的平行性和安稳性,而升降组织操控器的规划极大进步了组织的主动化水平。本规划为升降组织高安全系数、高牢靠性供给了确保,一起为无人机载设备小型化做出了奉献。一起,这一规划适用于大多数三相电机的操控体系,有很强的实用价值。






