


鞋类装置出产线一向存在非常传统、劳作高度密布的特征,特别是在鞋类制作工艺的所谓鞋楦/制作阶段。新技术(特别是工艺自动化和机器人)标明这一制鞋阶段的安排具有立异办法。机器人正吸引着各种制作范畴越来越多的重视,特别是劳作本钱正在快速涨升的一些国家,包含我国。咱们将在本文中评论用于制作带有装有鞋面和粘接外底的鞋类的机器人,以阐明装置出产线的安排怎么遭到机器人的影响以及制作体系的结构怎么改变。

咱们的聚集点将是鞋类装置(制作)出产线,但这并不意味着其它部分未运用机器人:曩昔和最近从前展开了在完结操作中运用机器人的试验,人们的理念现已推进将机器人用于缝制使命(三维缝制杂乱的鞋类几许结构)以及激光符号。这些范畴依然存在巨大的开展空间,可是,现在咱们依然处于运用研究阶段,需求时刻才干目击第一批工业运用的呈现。相反,关于制作操作,咱们现已具有现在用于出产的一些施行示例以及本剖析中评论的新理念。
在查询机器人用于制鞋的现在和未来运用中,咱们能够了解机器人操作的许多不同方法:
● 机器人操作结尾履行器。在第一种计划中,将一个特定的结尾履行器(优化用于即将履行的使命,有时选用多种东西设置布局,设置中将两个东西装置在相同的结尾履行器上)固定到机器人腕部,将需求加工的鞋类装置到特别支撑件上(在机器人是自动化体系的一部件时,一般为传输鞋类的托盘)并在机器人履行加工使命时将鞋类牢靠固定在位。
● 机器人操作鞋类。在这种代替计划中,将一个特别的夹紧组织装置到机器人腕部;运用夹子从空间内的给定方位(鞋类一般装置在托盘上并在机器人前部传输)抓住鞋类(或许最好经过装置在其上的金属衔接板抓住鞋楦)并将鞋类移动到一个或多个活动作业站(每个作业站履行一项特定使命或一部分使命)。在此状况下,机器人也有必要跟从选用与前一种状况类似的方法编程的预界说轨道移动(需求履行的每项特定使命或分使命的轨道)。
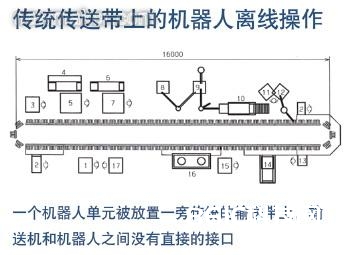
● 机器人仅履行拾取和放置操作,这或许是最“立异”的计划,因而短少这一方面的施行示例(这种现象并不古怪)。在此状况下,机器人不在鞋类上履行任何“活动”使命,而是将需求加工的鞋类从一个工位“转移”到另一个工位;这或许是能够运用机器人的最“人神一体”方法,意即机器人履行的使命与操作员履行的使命(从传送器上拾取鞋类并放入任何类型的自动化机器或许使鞋类从一台机器传送到另一台机器)非常类似。这些操作便是典型的拾取和放置使命,归于机器人的典型操作范畴,咱们能够全面使用它的灵敏度和速度。传送器与机器或许机器与机器乃至是人机使命,便是在制鞋机器人的这种最终场景中咱们能够幻想的使命。

假如这些便是能够使用机器人履行鞋类操作的方法,则咱们现在能够了解这些方法怎么实践用于根据机器人的典型制作出产线;为此,咱们有必要考虑两种要素:一切或许施行计划中的机器人自身,以及鞋类怎么从出产线的一个作业站传输到另一个作业站,即选用哪种传输方法。这两种要素协同作业,作业方法导致完成一些典型的操作计划。






