


摘要:电能质量首要有三个目标,即电压频率、电压幅值、相位联系。但是实践水力发电中所发生的电能是不抱负的。如果把发电机组和智能操控看作全体来规划,经过水轮机光电码盘传感器,把速度收集后传送到DSP芯片,与设定值进行比较,进行PID调理,输出对调速器进行操控;一起收集发电机输出端的电压与规范值进行比较,经过电压互感器收集数据进行PID调理,核算输出电压来操控励磁电流。然后完成机组优化操控,得到较为优质的电能对社会具有重要含义。
电能因为其出产、使用便利,运送安全经济的长处逐步成为了世界第一动力。而且,电能相较于其他动力具有可再生性,可以广泛运用于社会生发日子,对社会开展具有重要含义。电能如此重要,所以咱们才需要对其加以操控,使电能更好地便利人们的日常日子、维护社会的调和以及国家的安稳。咱们都知道任何电产品都有关于额外电压、电流、功率等相关目标,这也便是阐明咱们所提供应用户的电能也应该有具体的目标,便是电能质量目标。因而,操控发电源头,使出产出来的电不断趋近于合格目标然后再并入电网,可以使可用电能得到极大的优化。
1 现在水力发电现状
从我国的地域资源来看,河流很多的状况为水利发电带来了巨大的潜力,尤其是小型水利发电。但现在小型水电站归纳自动化程度并不高。在相关技能现已老练的条件下,研制高性能、低本钱的小水电机组归纳自动化体系显得尤为重要。不同结构和功用的水电操控体系已有开发,如开端研讨和探讨了水轮发电机组归纳操控器理论规划,规划了多CPU完成的小水电多功用一体机。其间多CPU的规划条理清楚,结构清楚,但这种计划关于小型水电站来说造价偏高,且多CPU资源不能充分使用。跟着DSP技能的高速开展,集机组维护、励磁操控、调速操控、水机自动化和通讯等功用于一体的归纳操控器愈加完善,它既降低了小水电站操控设备的本钱,又进步设备的可靠性和操控性能目标,实用价值极高。
2 操控体系总体规划
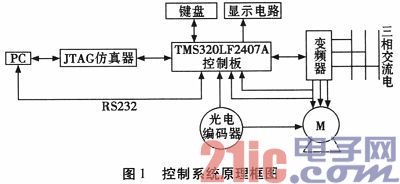
2.1 操控体系硬件结构图
体系的作业原理是:TMS320LF2407DSP芯片是体系中的中心操控,当体系开端运转时,核算机使用串口通讯向TMS320LF2407DSP芯片发送操控指令和参数,DSP经过中止的方法承受操控指令和相关参数,经芯片内部运算部分运算处理后,将承受到的操控指令和参数转化为同步电机的履行指令,DSP再依据电机履行指令操控通用输入/输出引脚向步进电机驱动器宣布脉冲信号。其间DSP芯片是操控中心,外围电路可增加显示器等。该芯片本身带有A/D转换器、I/O口以及通讯接口,还带有一般操控器并不具有的毛病维护电路、数字测速以及PWM生成功用,简化了体系的硬件部分装备。
2.2 操控体系软件规划及PID算法
2.2.1 操控体系软件规划
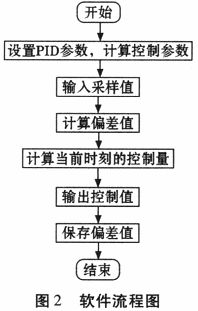
操控器的软件选用C言语编写,软件首要由主程序、定时器、中止程序及PWM脉冲发生中止程序构成。其间,体系初始化程序包含设置时钟,初始化I/O口、A/D口及PWM口。主程序在检测I/O口状况后,将其值存入寄存器,当中止来暂时,设置PID参数,输入采样值,将采样值与给定值进行比较并核算误差量,依据误差量核算当时时间操控量,输出操控值并坚持误差值。
2.2.2 PID算法的数字完成
PID调理算法适用于模仿调理体系,因为核算机体系只能接纳数字量,因而,要想在核算机中完成PID调理,有必要把PID算法数字化,然后才干用核算机完成。
PID算法数字化:

式中,T为采样周期,有必要使T满意小,才干确保体系的精度;E(k)为第k次采样时的误差值;E(k-1)为第k-1次时的误差值;k为采样序号,k=0、1、2…;P(k)为第k次采样时调理器的输出。
因为式(3)的输出值与阀门开度方位对应,因而,式(3)为方位型PID的方位操控算式。
依据递推原理,则k-1次的PID输出表达式:

令△P(k)=P(k)-P(k-1),式中Kp、KI、KD与式(5)相同。此式表明输出一个增量为第k次和k-1次的差值,所以又名增量型PID操控算式。
3 结束语
电力体系的安稳运转关于国民经济的开展和人民日子水平的进步一向具有严重的含义。本规划研讨首要在于让本来独立考虑的励磁体系和调速体系结合起来,经过DSP芯片把独立的操控结合起来依据机组运转状况,完成了传统操控设备的和谐操控的一起进步操控的运算速度和精确度,然后出产出满意生发日子的优质电能。与曩昔选用单片机和CPU来完成操控和运算比较,DSP芯片的运用更具有实用价值。






