


摘要:为了改进驾驶员在夜间或能见度较低环境下的视界规模,进步行进的安全性,介绍了一种依据嵌入式体系的轿车自适应前照灯体系的规划方案。此体系中的前照灯操控器选用FPGA来操控CAN总线操控器、数/模转化器和全桥电机驱动器等器材来完结接纳方向盘转角信号,并使电机运转带动前照灯的转向。自适应前照灯体系操控中心运用的是ARM9处理器。该规划方案满意要求,已经在项目中获得了杰出的运用作用。
导言
轿车自适应前照灯体系是轿车安全体系的重要组成部分,它能依据转向角和车速的改变自动调整前照灯光束照耀方向,增加了轿车行进前方的有用照耀区域,然后进步驾驶员在夜间或能见度低的环境下的视觉规模。
本规划选用了嵌入式技能来完结,嵌入式技能不只广泛地运用于轿车行业,并且在工业自动化、监控体系、医疗仪器等范畴也有广泛运用。
1 体系原理规划
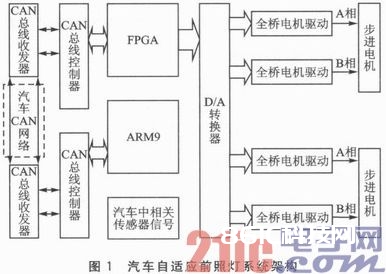
本文介绍的轿车前照灯转向操控器首要是由FPGA、D/A转化器、CAN总线操控器和电机驱动芯片等器材组成的。它的规划分为CAN总线操控器模块和电机驱动模块两部分,由FPGA来操控并衔接这两个模块。CAN总线操控器模块完结接纳CAN报文包音讯,FPGA经过处理CAN报文包音讯来操控电机驱动模块使左右电机别离滚动。轿车前照灯转向操控中心运用的是ARM9处理器,它首要处理相关传感器的信息并依据相应的自适应算法计算出前照灯转角视点。体系的架构图如图1所示。
2 硬件规划
2.1 CAN总线结点操控器模块
本模块规划中的CAN总线结点操控器模块首要是由FPGA、CAN总线操控器、CAN总线收发器和一些外围电路完结的。CAN总线通讯的中心是CAN总线操控器,由它完结CAN总线的通讯协议,完结物理层和数据链路层的一切功用。CAN总线收发器依照BOSCH CAN总线规范将0或1逻辑信号转化为规范中规则的电平。本规划中选用了Microchip公司开发的CAN总线操控器MCP2510和CAN总线收发器MCP2551。CAN总线结点操控器模块电路原理图如图2所示。
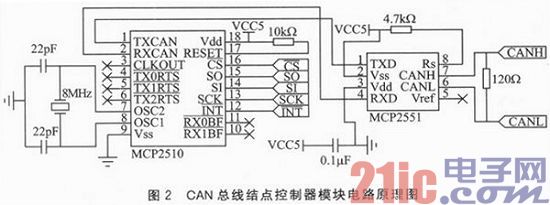
Microchip公司出产的MCP2510是一款操控器局域网络(CAN)协议操控器,彻底支撑CAN总线V2.0 A/B技能规范。该器材支撑CAN1.2、CAN2.0A、自动和被迫CAN2.0B等版别的协议,可以发送和接纳规范和扩展报文。它还一起具有检验过滤以及报文办理功用。该器材包括三个发送缓冲器和两个接纳缓冲器,减少了单片机(MCU)的办理担负。MCU的通讯是经过行业规范串行外设接口(SPI)来完结的,其数据传输速率高达5 Mb/s。
图2中
、SO、SI、SCK、
接口与FPGA引脚接口相连,FPGA经过与
、SO、SI、SCK相连的引脚完结SPI接口,并与MCP2510中止信号接口INT结合来完结对MCP2510的操控。CANH和CANL衔接到CAN总线网络中。
2.2 电机驱动模块
本模块规划首要由FPGA、D/A转化器、电机功率驱动器组成,经过FPGA操控D/A转化器、电机功率驱动器完结步进电机的细分驱动技能,然后完结对步进电机的操控。本规划中的D/A转化器选用Maxim公司开发的MAX506,电机功率驱动器选用NS公司开发的LMD18245,完结两个步进电机的功率驱动及电流操控,完结对轿车两个前照灯的智能转向。
LMD18245是NS公司出产的DMOS全桥功率放大器,其内部集成了驱动和操控有刷直流电机或单相双极性步进电机的一切电路模块。该器材在同一芯片中组合运用了双极、CMOS操控、维护电路和DMOS功率开关等多种技能,并可经过固定关断时刻技能来操控电机的电流。
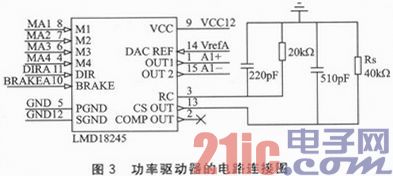
图3为LMD18245芯片的电路衔接图。总共用了4块这种芯片组成一个双步进电机驱动。在图3中衔接RC端的%&&&&&%和电阻构成了一个单稳态网络,它的宽度取决于RC端与地之间的RC网络,关断时刻为1.1RC。当A1+、A1+衔接的电机线圈内的电流到达(VrefA×D/16)/[(250×10-6)Rs]安培时,呈现断路。其间D是由M1~M4给定的十进制数。本规划中的VrefA端输入电压最大为5 V,接在CS OUT端的电阻Rs为40 kΩ,所以步进电机的最大电流限定为0.5 A,满意本规划运用的42BYGH4604步进电机的额定电流。电路中DIR是电流方向操控信号,BRAKE是关断信号,DAC REF、M1、M2、M3和M4是内置4位D/A转化器的参阅电压和数字输入信号。

图4为D/A转化芯片MAX506的电路衔接图,MAX506是4路8位电压输出的数/模转化器(DAC)。MAX506供给了4路DAC各自独立的输入锁存器,输入数据从一个共用的8位输入端口传输到输入锁存器。MAX506经过地址输入A0和A1挑选DAC,并经过拉低WR电平信号来更新。电路中的VrefA、VrefB、VrefC、VrefD为4片LMD18245供给DAC REF的参阅电压。
3 软件规划
本文中MCP2510首要采纳中止形式进行总线数据的接纳。整个体系主程序只供给了一种中止,首要对MCP2510发送复位指令使它复位,然后使其进入Configuration形式进而对它进行初始化,即对各个相应的寄存器赋初始值,设定MCP2510的波特率、发送标识符、接纳标识符、报文检验滤波器及屏蔽寄存器,完结初始化后将其置为Normal形式,进入等候接纳数据状况。
电机驱动模块电路程序的规划首要有三部分:两个循环加减计数器、两个ROM IP核和4路复用D/A转化器的片选信号产生单元。ROM是用ISE供给的IP核来完结,对24MHz体系时钟进行分频得到D/A转化器的片选信号,然后对4个端口进行扫描,就可以到达分时复用的意图。
轿车前照灯转向操控中心首要对各轿车传感器信号进行接纳,并依据轿车自适应前照灯的原理完结它的相关操控算法,然后发送操控信号给轿车前照灯转向操控器,使它操控前照灯完结智能转向。
在轿车中,轿车速度V和安全泊车视距S的数学联系如表1所列。

依据表中的数据,得到轿车速度与泊车视距间的拟合数学联系如下:
S=0.0015V3+0.21V2+0.6821V+10.0122 (1)
当轿车转弯时,轿车前照灯转向操控中心依据轿车转弯半径和速度计算出前照灯的滚动视点。然后轿车前照灯转向操控器经过操控步进电机来执行前照灯的转向。泊车视距与转弯半径的几许联系图如图5所示。
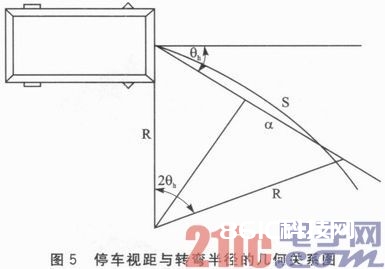
图5中,R(单位为m)是轿车转弯半径;θh(单位为度)是前照灯的水平方向滚动视点;S(单位为m)是泊车视距。泊车视距的计算公式为:
![]()
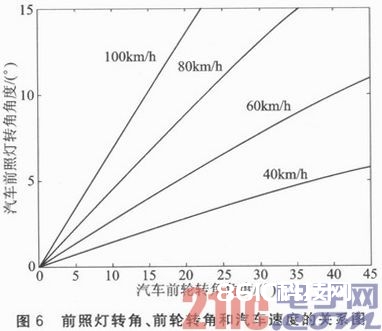
在实践情况下,转弯半径不简单获取,所以一般经过轿车前轮转向视点来替代轿车转弯半径。依据阿克曼几许转向原理,轿车前轮转角与转弯半径的联系如下:
假定轿车的轴距为2.812 m,得到如图6所示的前照灯转角视点、前轮转角视点和轿车速度的联系图。
4 体系测验
测验中轿车前照灯转向操控中心经过搜集轿车速度和方向盘转角传感器信号计算出前照灯转角视点,然后向轿车前照灯转向操控器发送操控信号。因为轿车前照灯要求滚动的视点较小,最大滚动视点只要15°,所以很简单到达响应速度的要求。测验标明,前照灯转角视点差错较小,满意体系要求。






