


跟着无人机正在成为新的经济增长点和国民收入水平的进步,近年来在高校和民间都得到了更多的重视。无人机是无人驾驭飞机的简称,是运用无线电遥控(含长途驾驭)、预设程序操控和(或)根据机载传感器自主飞翔的可重复运用不载人飞机。现在用无线电遥控的无人机大部分运用JR或许Futaba公司出品的专用遥控器,这些遥控器长处是手感好,便利带着,可是价格昂扬,通道数较少,难以满意无人机履行使命时需求较多通道数的要求。少部分运用PC作为操控渠道,运用了飞翔摇杆作为操控器,能完成更专业的功用,通道数也多,可是带着不便利利,需求带着手提电脑或许PC到外场调试,还必须考虑电池续航问题,造价也比较昂扬,且需求专业的计算机软件常识进行编程。

为处理上述不便利,自己提出了一种根据Arduino的无人机操控器规划计划。Arduino是2005年1月由米兰交互规划学院的两位教师David Cuartielles和Massimo Banzi联合创立,是一块根据敞开原始代码的Simple I/O渠道.Arduino具有相似java、C言语的开发环境,将AVR单片机相关的一些寄存器参数设置等都函数化了,即便不太了解 AVR单片机的朋友也能轻松上手,规划出各种有用的电路开发体系,是一款价格低廉、易于开发做运用的电子渠道。Arduino包含硬件和软件在内的整个渠道是彻底开源的。该计划因为选用Arduino渠道,能快速开宣布用较低本钱的飞翔摇杆来进行操作航模,体会实在飞翔的感觉。因为接口较多,能够完成高达 20通道以上,能履行各种扩展使命,且不需求带着电脑。
体系原理与架构规划
体系框图如图1所示,分为两大部分,别离是地上操控部分和操控履行部分。地上操控部分是由单片机读取飞翔遥杆的数据,即可取得飞翔摇杆各个通道的即时电压,经过形式转化后,得到各个通道的值。将上述值经过编码后经过无线数传模块发送出去。
空中指令履行部分:
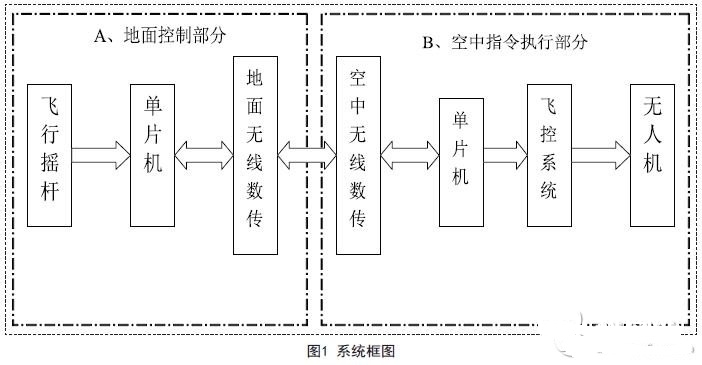
由空中无线数传接纳到信号后将指令发送到单片机,单片机将指令解析,并转化为飞控体系常用的PPM信号,该PPM信号能够直接驱动飞控体系做出呼应动作,然后操控无人机。
模块原理、规划与制造
1.摇杆信号获取原理
要得到飞翔摇杆当时的杆量,一个办法是经过摇杆的usb接口读取,因为各个厂家的通讯协议都不兼容,有些还必须取得授权,完成起来比较费事。另一个办法是直接获取摇杆的电位器值。实践上现在市面上的摇杆除了十分高端的摇杆用了霍尔传感,大部分都选用了一般的电位器,依照可变电阻来读取即可。本模块选用市场上常见的赛钛客FLY5飞翔摇杆,拆开来外壳,一切电位器都是用3P的白色衔接插座和电路板衔接的,XYZ三轴用来操控飞机姿势(升降、副翼和方向),油门由拉杆操控,苦力帽能够用来操控fpv摄像头云台,还有其他的按键能够映射为其他通道,例如空中抛掷物体,主动回家,切换飞翔形式等。
2.杆量解析处理模块
咱们选用的单片机体系选用了ArduinoM E G A 2 5 6 0 开发板。该开发板是一块以ATmega2560($10.4500)为中心的微操控器开发板,自身具有54组数字I/O其间14组可做PWM输出),16组模数转化输入端,4组串口,运用16MHz的晶振。读取摇杆的XYZ 轴的电阻值,只需将电位器的电源和地接在电调输出的5v和地上,信号线接在Arduino板的模仿输入口上,因为Arduino的AD读取精度最高是10 位,在程序里将电阻值映射成0到1023的数值,FLY5飞翔摇杆的分辨率大概在800~900左右。飞翔摇杆的电位器是线性的,反响较为活络的。实践测验中摇杆回中后,和打到最大和最小的当地,数据会有一些动摇和噪点,选用卡尔曼滤波算法进行处理,能够取得滑润的曲线。
3.无线收发模块
无线数传模块选用了一对X b e e P R O900HP无线收发模块,该模块功率为250mW.它们别离用来衔接地上操控板单片机和衔接飞翔操控的单片机。装备原装天线,最远能够到达10KM,比传统遥控器间隔极大的添加。标准的串口TTL接口,将RX和TX别离接在单片机板上的TX和RX端口上即可。波特率设置为115200($0.1530),数传是半双工的,通讯添加CRC校验,避免数据丢包和被搅扰篡改。
4.指令解析模块
有了杰出的通讯协议,空中操控板解分出地上宣布的指令后,做出相应的驱动舵机的动作。标准PPM信号的周期固定为20ms,理论上脉宽(脉冲的高电平部分)范围在1ms-2ms之间,但实践上脉宽能够在0.5ms-2.5ms之间,脉宽和舵机的转角0°-180°相对应。现在大多数无人机飞翔操控器的接纳部分都遵从1-2ms标准,50HZ的数据刷新率。本规划选用DJI公司的NAZA-M飞控模块。
5.失控维护模块
在空中指令履行部分的单片机操控体系中,规划失控维护装置。在Arduino中规划定时器中止,每隔一段时间查询有无收到指令(正常情况下每秒应该接纳50条指令)。因为飞翔器速度高,瞬息万变,因而能够设置为1秒没有接纳到任何一条指令,则进入悬停状况,原地悬停待命,在30秒内没有收到地上的指令后,应该进入失控维护,并切换到飞翔器操控器的GPS主动归航形式。
运用飞翔摇杆进行操控更具有实在感,是传统遥控器无法体会的。左手油门,右手操控升降,副翼,扭动z轴操控方向舵。地上站装备 9dBi全向天线,空中装备3dBi原装天线在开阔地实测操控间隔为8KM.在单向传输的时分没有呈现显着推迟和抖舵,合适直升机或多旋翼无人机等低延时的操控要求,实测延时小于20ms.双向传输的时分延时较大,乃至呈现了500ms以上的延时,只能适用于固定翼和滑翔机等对延时要求不高的飞翔器。经过对数传模块的剖析,原因是数传模块大多都是在单频率下,只能完成半双工的无线传输,发送和接纳切换需求延时,假如数据量大会形成堵塞,然后加大延时。
本文供给的处理计划,本钱较低,开发便利,易于完成。不足之处是单向传输尽管延时低,可是无法实时回来飞翔器的各种数据。为处理该问题,只能运用2对无线模块,或选用MIMO天线能完成全双工的无线模块,才干处理。后期将会持续研讨,以完成低本钱的双向传输,并完成实时数据回来的OSD和低延时操控。






