


红外测距传感器原理
超声波测距传感器原理:
超声波对液体、固体的穿透身手很大,尤其是在阳光不透明的固体中,它可穿透几十米的深度。超声波碰到杂质或分界面会发生明显反射构成反射成回波,碰到活动物体能发生多普勒效应。因而超声波检测广泛使用在工业、国防、生物医学等方面以超声波作为检测手法,有必要发生超声波和接纳超声波。完结这种功用的设备便是超声波传感器,习惯上称为超声换能器,或许超声探头。
激光测距传感器作业原理:
激光传感器作业时,先由激光二极管对准方针发射激光脉冲。经方针反射后激光向各方向散射。部分散射光回来到传感器接纳器,被光学体系接纳后成像到雪崩光电二极管上。雪崩光电二极管是一种内部具有扩大功用的光学传感器,因而它能检测极端弱小的光信号。记载并处理从光脉冲发出到回来被接纳所阅历的时刻,即可测定方针间隔。激光传感器有必要极端精确地测定传输时刻,由于光速太快。
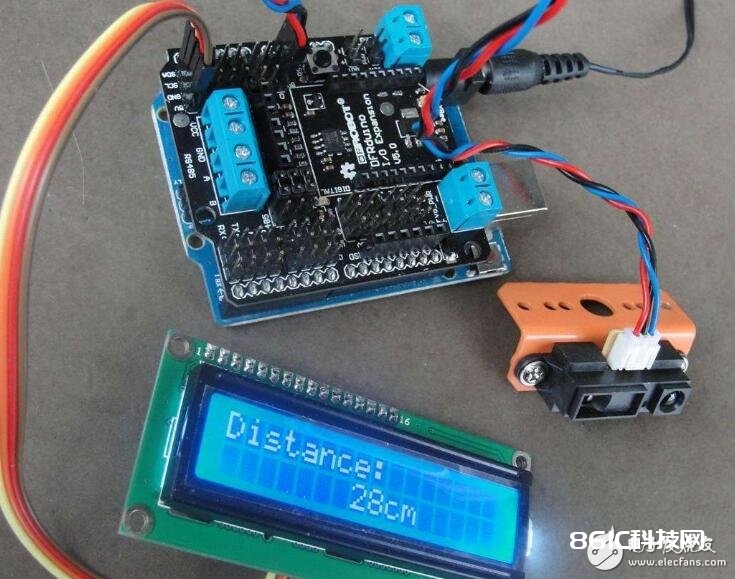
红外线测距传感器作业原理:
红外测距传感器使用红外信号遇到障碍物间隔的不同反射的强度也不同的原理,进行障碍物远近的检测。红外测距传感器具有一对红外信号发射与接纳二极管,发射管发射特定频率的红外信号,接纳管接纳这种频率的红外信号,当红外的检测方向遇到障碍物时,红外信号反射回来被接纳管接纳,经过处理之后,经过数字传感器接口回来到机器人主机,机器人即可使用红外的回来信号来辨认周围环境的改变。
红外测距传感器特色
1)远间隔丈量,在无反光板和反射率低的情况下能丈量较远的间隔;
2)有同步输入端,可多个传感器同步丈量;
3) 丈量规模广,呼应时刻短;
4) 外形规划紧凑,易于装置,便于操作。

红外测距传感器使用
近期来全球天然灾害频发,像近期的四川、智利的大地震、日本海啸,严重影响人类生命安全,而二次灾祸又对解救者带来了极大的危险,这时搜救机器人就可以很好的替代解救者来搜救被困人群。传感器是搜救机器人不行短少的器材,机器人上有很多种传感器,其间就有红外测距传感器。
运动才干、感知才干、通讯才干和作业才干等几个方面才干是搜救机器人有必要具有的。搜救机器人的通讯作业才干需求依托机器人杰出的运动才干和感知才干,而机器人的运动才干和感知才干是建立在传感器的有用发挥上的。红外传感器在搜救机器人上的使用相当于人眼的功用,使用的红外测距传感器发射出一束红外光,在照射到物体后构成一个反射的进程,反射到传感器后接纳信号,然后使用图画处理接纳发射与接纳的时刻差的数据。经信号处理器处理后计算出物体的间隔。这不仅可以使用于天然外表,也可用于加反射板。丈量间隔远,很高的频率呼应,适合于恶劣的工业环境中。
机器人一仅仅近年来的热门,机器人能做许多人所不能的事,尤其是在面对大灾祸后的搜救作业时,机器人就发挥出巨大的效果,机器人的功用是在传感器的基础上发展出来的,所以只要先进的传感器技能才干制作出高性能的机器人。






