


STM32计数器时钟可由下列四种时钟源供给:
(1)内部时钟(CK_INT)
(2)外部时钟形式1:外部输入脚(TIx)
(3)外部时钟形式2:外部触发输入(ETR)
(4)内部触发输入(ITRx)
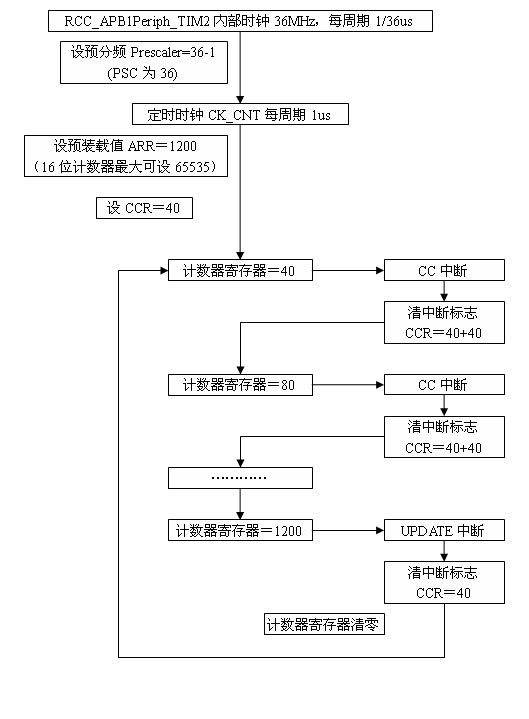
时钟源(CK_INT)经预分频(PSC)后得到守时时钟(CK_CNT),每个守时时钟计数寄存器计数(可设向上/向下/中心对齐形式),计数寄存器计数至捕获比较寄存器(CCR),则发生CC中止;计数寄存器计数至预装载值(ARR),则发生UPDATE中止,并重装预载值。
举个比如:(以向上计数为例,每40us中止一次)
void TIM2_Configuration(void)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);// for 36MHz
TIM_DeInit(TIM2);
TIM_TimeBaseStructInit(&TIM_TimeBaseStructure);
TIM_TimeBaseStructure.TIM_Period = 1200;// 预装初值
TIM_TimeBaseStructure.TIM_Prescaler = 36-1;// 预分频
TIM_TimeBaseStructure.TIM_ClockDivision = 0x00; // 时钟分频因子(用于ETR,TIX)
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; // 向上计数
TIM_TimeBaseStructure.TIM_RepetitionCounter = 0; // 重复计数
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure);
/*——————-*/
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_Timing;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_Pulse = 40; //40us中止一次
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OC1Init(TIM2, &TIM_OCInitStructure);
TIM_OC1PreloadConfig(TIM2, TIM_OCPreload_Disable);
/*——————-*/
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_Timing;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Disable;
TIM_OCInitStructure.TIM_Pulse = 800;//PWM 800/1200
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OC2Init(TIM2, &TIM_OCInitStructure);
TIM_OC2PreloadConfig(TIM2, TIM_OCPreload_Disable);
/*——————-*/
//TIM_SelectSlaveMode(TIM2, TIM_SlaveMode_Gated);
//TIM_SelectInputTrigger(TIM2, TIM_TS_ITR0);
TIM_ARRPreloadConfig(TIM2, DISABLE);
TIM_ITConfig(TIM2, TIM_IT_CC1|TIM_IT_CC2|TIM_IT_Update, ENABLE);
TIM_Cmd(TIM2, ENABLE);
}
/*————–中止程序——————-*/
void TIM2_IRQHandler(void)
{
uint16_t capture = 0;
if(TIM_GetITStatus(TIM2, TIM_IT_CC1) != RESET)
{
if((timer_cnt1++)>49)
{
timer_cnt1 = 0;
f_2ms = 1;
}
TIM_ClearITPendingBit(TIM2, TIM_IT_CC1);
capture = TIM_GetCapture1(TIM2);
if(capture==1200)
TIM_SetCompare1(TIM2, 40);
else
TIM_SetCompare1(TIM2, capture + 40);
}
if(TIM_GetITStatus(TIM2, TIM_IT_CC2) != RESET)
{
GPIO_SetBits(P_LCDBK, LCDBK);
}
if(TIM_GetITStatus(TIM2, TIM_IT_Update) != RESET)
GPIO_ResetBits(P_LCDBK, LCDBK);
TIM2->SR = 0x00;
}






