


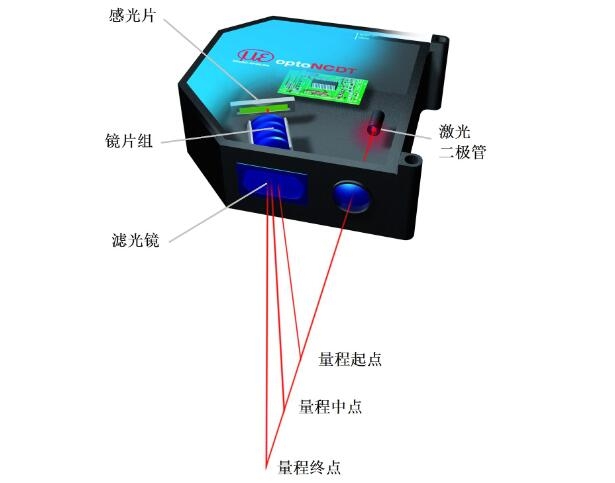
激光传感器作业原理
激光传感器作业时,先由激光发射二极管对准方针发射激光脉冲。经方针反射后激光向各方向散射。部分散射光回来到传感器接纳器,被光学体系接纳后成像到雪崩光电二极管上。雪崩光电二极管是一种内部具有扩大功用的光学传感器,因而它能检测极端弱小的光信号,并将其转化为相应的电信号。 常见的是激光测距传感器,它经过记载并处理从光脉冲宣布到回来被接纳所阅历的时刻,即可测定方针间隔。激光传感器准确地测定传输时刻,由于光速太快。
例如,光速约为3*10^8m/s,要想使分辨率到达1mm,则传输时刻测距传感器的电子电路能分辨出以下极短的时刻:
0.001m/(3*10^8m/s)=3ps
要分辨出3ps的时刻,这是对电子技能提出的过高要求,完成起来造价太高。可是现在的激光测距传感器奇妙地避开了这一妨碍,运用一种简略的统计学原理,即均匀规律完成了1mm的分辨率,并且能确保呼应速度。
激光传感器运用
跟着激光技能的前进,激光传感器也成为一种新的传感器类型,它是运用激光技能进行丈量的传感器,由激光器、激光检测器和丈量电路组成。激光传感器是新式丈量外表,长处是能完成无触摸远间隔丈量,具有速度快、精度高、量程大、电搅扰能力强等长处,在许多工业范畴有着广泛的运用。
1、测验丈量
运用激光的高方向性、高单色性和高亮度等特色可完成无触摸远间隔丈量,激光传感器常用于长度、间隔、振荡、方位等物理量的丈量,还可用于探伤和大气污染物的监测等。
2、激光测速
激光测速是基多普勒原理的一种激光测速办法,用得较多的是激光多普勒流速计,它能够丈量风洞气流速度、火箭燃料流速、飞行器喷发气流流速、大气风速和化学反应中粒子的巨细及会聚速度等。
3、车辆宽高超限检测
选用激光传感器进行快速丈量,运用PC工控机和可视化编程软件VB的网络内核与传感器进行数据的实时传输及处理,一起还规划了界面友爱的上位机操控软件。现场实验数据标明,该体系实时性好、丈量精度高,具有必定的实用价值。
4、无人车
如谷歌的第二代无人车装备了激光传感器,顶部的激光传感器仍然适当显着,其他传感器都设置得十分荫蔽。车辆的前后方和两边都贴有显着的谷歌无人车标志。谷歌无人车的操控驾驭原理是经过车子四周装置的许多传感器,继续不断地搜集车辆本身以及四周的各种准确数据,经过车内的处理器进行剖析和运算,再依据计算结果来操控车子行进。
5、轿车防撞探测器
大多数现有轿车磕碰防备体系的激光测距传感器运用激光光束以不触摸方法用于辨认轿车在前或许在后局势的方针轿车之间的间隔,当轿车间隔小于预订安全间隔时,轿车防磕碰体系对轿车进行紧迫刹车,或许对司机宣布报警,或许归纳方针轿车速度、车距、轿车制动间隔、呼应时刻等对轿车行进进行即时的判别和呼应,能够许多的削减行车事端。
激光式传感器的结构和原理简略牢靠,抗搅扰能力强,适应于各种恶劣的作业环境,分辨率较高,未来在许多范畴可发挥本身的效果。






