


跟着MEMS传感器的规划和制作工艺的跋涉,MEMS压力传感器被广泛用于医疗、轿车和消费电子等运用领域。例如,压力传感器可用于监测血压,轿车厂商运用气压传感器优化发动机能效,提示驾驶员轮胎气压缺乏。
最近几年,跟着MEMS压力传感器的功用不断前进,本钱和尺度不断下降,消费电子厂商开端运用压力传感器与惯性传感器和地磁传感器模组完成航位估测和导航功用。
本文榜首部分概述大气压与海拔高度的联系。第二部分描绘怎么运用压力传感器核算海拔高度。第三部分介绍怎么在一个个人导航仪如智能手机内集成压力传感器。
大气压与海拔高度的联系
在个人导航仪中,MEMS压力传感器充任气压计用于丈量海拔高度改变。因而,咱们有必要了解不同高度的大气压。
下面是大气压丈量单位:
psi – 磅/平方英寸
cm/Hg – 水银柱高(厘米)
cm/Hg – 水银柱高(英寸)
Pa – 帕,国际制压力单位 (SI) ,1Pa = 1 N/m2
bar – 巴,气压单位,1 bar = 105Pa
mbar – 毫巴,1mbar = 10-3 bar
咱们居住在地球大气层的底层,大气压跟着海拔高度上升而下降。咱们将在59 ℉时的29.92 in/Hg海平面气压规定为标准大气压,这个均匀值不受时刻影响,而遭到丈量点的地舆方位、气温和气流的影响。
1 个标准大气压 = 14.7 psi = 76 cm/Hg = 29.92 in/Hg = 1.01325 bar = 1013.25 mbar
能够用下面的表达式表明大气压与海拔高度之间联系 [1]:
其间:P0 是标准大气压,等于1013.25 mbar;Altitude是以米为单位的海拔高度。P是在某一高度的以mbar为单位的气压
图1依据上面的公式描绘了大气压改变与海拔高度的联系。
如图1所示,当高度从海平面上升到海拔11,000米高时,大气压从1013.25 mbar降到230 mbar。咱们从图中不难看出,当高度低于 1,500米时,大气压简直呈线性下降,每100米大约下降11.2 mbar,即每10米大约下降1.1 mbar。为了取得更准确的高度丈量数据,能够在方针运用中构建一个大气压高度查询表,依据压力传感器的丈量成果,确认对应的海拔高度。
假如运用全量程为300 mbar到1100 mbar的肯定MEMS压力传感器,丈量高度可达海拔9,165米到海平面以下698米。
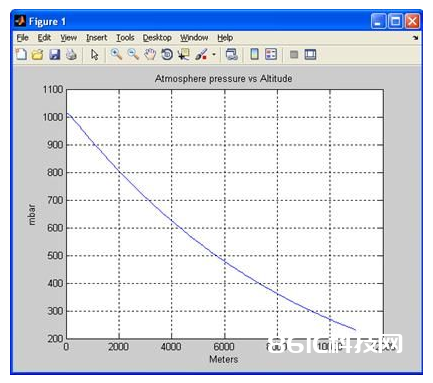
图 1: 大气压与海拔高度的联系
2. 运用MEMS传感器确认楼层
0.1 mbar rms的丈量分辨率使MEMS压力传感器能够发现在1米以内高度改变。因而,在高层建筑内,能够运用压力传感器发现楼层改变。
图2所示是在意法半导体的意大利Castelletto写字楼内收集到的压力传感器数据。采样速率是7Hz,数据收集时刻总计大约23分钟。从图中咱们能够明晰地看到大气压在不同楼层的改变。大气压在地下室最高。跟着楼层升高,大气压逐步下降。
图3所示是意法半导体的一个MEMS压力传感器,这是一个选用3 x 5 x 1mm LGA-8封装的数字输出压力传感器,内置I2C/SPI接口和16位数据输出。量程是300 mbar到1100 mbar,分辨率为0.1mbar。该芯片还内置温度传感器。芯片内部操控寄存器能够指示丈量成果是高于仍是低于压力极限预设值。
压力传感器的丈量精度会遭到气流和气候条件的影响。为了取得准确、牢靠的楼层丈量成果,需求为压力传感器开发校准和滤波算法。
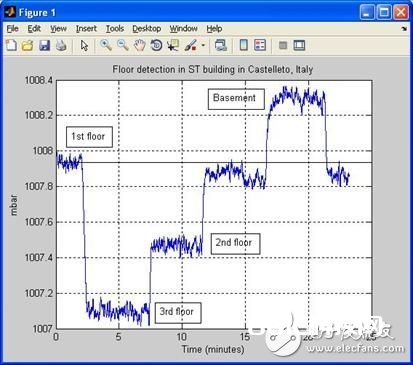
图 2:从意法半导体传感器原始数据取得的楼层检测成果
图 3:意法半导体的MEMS压力传感器
3.在个人导航仪中运用MEMS压力传感器
在当时市面上出售的智能手机中,大多数都内置了GPS接收器和低本钱的MEMS运动传感器,例如,加速度计、陀螺仪和/或磁力计。在没有GPS卫星信号的建筑物内或GPS信号很弱的楼房树立的大都市内,个人导航或航位估测关于导航变得非常重要。鉴于GPS接收器在户内野外丈量高度都不行准确,在智能手机内集成压力传感器能够辅佐GPS丈量高度。
个人导航体系(PNS)与个人航位估测(PDR)体系类似。从基本原理看,当无法取得GPS卫星信号时,PNS或PDR能够在智能手机的电子地图上持续供给方位和跋涉信息,引导用户抵达爱好点,取得方位相关服务(LBS)。
跋涉信息能够来自磁力计或陀螺仪或两者的模组。PNS是运用惯性导航原理(INS)对加速度计的丈量值进行两层积分求处理方位信息,而PDR是计步器和步长预算器依据典型计步器原理核算加速度计供给的丈量数据而取得的方位信息。在必定时刻内取得跋涉方向和跋涉旅程的信息后,导航体系在智能手机的电子地图上更新行人在户内的方位。
3.1 PNS或 PDR结构暗示图
图4所示是PNS或PDR的结构暗示图。从传感器视点看,该体系包含一个3轴加速度计、一个3轴陀螺仪、一个3轴磁力计和一个压力传感器。此外,在这个暗示图内还有一个GPS接收器和一个主处理器。主处理器用于收集传感器数据,工作航位估测算法和卡尔曼滤波算法
图 4:PNS或 PDR结构暗示图
图4中每个组件的优缺陷归纳如下:
GPS接收器:
长处:GPS能够供给进入建筑物前的初始方位;检索地球偏转角信息,依据地舆跋涉方向批改磁力计跋涉方向;当GPS信号增强时校准计数器步长;分别向惯性导航体系的松耦合和紧耦合卡尔曼滤波算法供给有界的准确方位信息(经纬度)输出和伪距原始丈量输出。
缺陷:当行人坚持中止时,GPS无法确认跋涉方向;无法检测高度(海拔高度)的纤细改变。
加速度计:
长处:在静态或慢速运动状况下可用于倾斜度批改型数字罗盘;在线性加速度状况下可用于计步器的检测功用;用于检测步行人当时的状况是中止仍是运动。
缺陷:当智能手机旋转时,无法从地球重力组分中差异真实的线性加速度;对轰动和振动过于灵敏
陀螺仪:
长处:能够向惯性导航体系接连供给旋转矩阵;当磁力计遭到搅扰时,辅佐数字罗盘核算跋涉方向信息
缺陷:长时刻的零偏漂移导致无限的INS定位过错。
磁力计:
长处:能够依据地磁北极核算准确的跋涉方向;能够用于校准陀螺仪的灵敏度。
缺陷:简单遭到环境磁场搅扰
压力传感器:
长处:在室内导航运用中可区别楼层;当GPS卫星信号较弱时,可辅佐GPS核算高度,前进定位准确度;
缺陷:简单遭到气流和气候状况的影响。
3.2 PNS或PDR的完成办法
有两种办法能够在智能手机上完成PNS或PDR导航。榜首种办法是运用捷联式惯性导航体系(SINS)完成PNS;第二种办法是运用计步器办法完成PDR。这两种办法都有各自的长处和缺陷。
捷联惯导体系是依据一个3轴加速度计和一个3轴陀螺仪的6自由度(DOF)惯性丈量单元。捷联惯导体系被成功用于外壳刚性很强的设备内,例如,惯性丈量单元被永久性安装在轿车和导弹内。该体系在短时刻内的定位精度相对较高。由于低本钱MEMS运动传感器的零偏漂移问题,当没有GPS卫星信号时,通过积分和二重积分运算后,定位差错会随时刻推移而变大。此外,行人一般把智能手机放在衣袋或挂在腰带上,他们随时都会从衣袋里或腰带上取出手机检查当时地点方位。这就是说,智能手机与用户身体的相对方位不固定。
不过,SINS/GPS集成化PNS体系的长处是定位与用户无关,这就是说,一切用户无需给智能手机建模或练习智能手机,以习惯不同类型的行人的动作,例如,步行、跑步和上下楼梯等。
计步器/GPS集成化PDR体系的长处是定位精度首要取决于加速度计计步和GPS步长预算,定位差错始终是有限的 [2]。
PDR的榜首步是运用加速度计准确检测脚步 [3]。这个进程的基本原理是,智能手机在行人的腰带后部无论怎么放置,都能主动发现笔直主轴;然后,将加速度丈量数据与榜首个参阅阈值比照,随后,参阅阈值将依据不同的运动类型主动更新。因而,加速度计能够准确核算行人步行、跑步和上下楼梯时的步数。
第二步是当GPS信号很强时校准步长。智能手机核算行人的均匀步长的办法是,用从GPS开端丈量起通过的间隔除以上面的计步器算法得出的步数。步行人的一切的运动类型,例如,慢走、快走、慢跑、快跑、上下楼梯等,都需求履行步长校准进程。不同的行人有不同的运动办法。因而,PDR与用户有关,一切的步行人都需求一个主动校准或自我练习的步长预算算法。
第三步是整合加速度计、陀螺仪、磁力计和GPS接收器的数据求解准确的跋涉信息。在预算完步长后,求解航位估测运用的另一个要害参数:以地球北极为参阅点的肯定跋涉方向。在一个无磁场搅扰的环境内,加速度计和磁力计丈量成果发生的倾斜度批改的数字罗盘能够供给以地球北极为参照点的准确的跋涉方向。
在进入建筑物前,GPS定位信息能够依据方位检索倾斜角,然后,把罗盘供给的跋涉方向数据转化成地舆跋涉方向信息。假如周围环境没有搅扰磁场,能够运用磁力计的丈量数值提取跋涉方向信息。假如发现搅扰磁场,陀螺仪将顶替磁力计的作业,在上一次无搅扰的罗盘跋涉信号输出基础上供给接连的跋涉信息输出。
一旦发现外界磁场搅扰消失,陀螺仪将当即中止工作,罗盘将顶替陀螺仪康复工作。这个进程被称之为陀螺仪辅佐数字罗盘。当智能手机是中止状况时,加速度计就会让陀螺仪定时更新零角速率电平以备将来运用。
第四步是从压力传感器和GPS接收器取得准确的高度信息。当行人在购物中心乘坐电梯或登楼梯时,压力传感器会更新数字地图,显现行人当时地点楼层。压力传感器还能运用卡尔曼滤波器滤除加速度计的Z轴漂移。
第五步是开发卡尔曼滤波算法,兼并10-D传感器模组数据与GPS数据。一切的GPS接收器都有1个PPS (脉冲/秒)输出信号,使GPS与传感器的数据传输同步,传感器的采样速率能够更快,例如50Hz或100Hz。当能够收到GPS卫星信号时,卡尔曼滤波器将运用GPS输出数据核算导航信息;相反,当GPS卫星信号被屏蔽时,则运用航位估测算法输出的数据。当GPS信号康复时,该滤波器还能预算需求批改的传感器差错。
最终一步是在智能手机上测验PDR的功用。关于消费电子产品,5%的跋涉间隔差错一般是能够承受的。例如,当一个人在室内走过100米的间隔时,定位差错应该在5米范围内。
4.定论
MEMS技能和制程的开展跋涉发生了低本钱、高功用的MEMS加速度计、陀螺仪和压力传感器。跟着尺度越来越小,功耗越来越低,这些产品开端在智能手机等手持产品上演绎令人震慑的新功用。
在无人驾驶飞行器(UAV)导航体系和室内PDR运用方面,MEMS压力传感器正在引起业界的激烈重视。跟着先进滤波算法研制的深化,在室内完成5%的间隔差错是切合实际的。






