


现在市面上的可穿戴设备越来越多,关于可穿戴设备,尤其是手腕式的可穿戴设备的竞赛日益剧烈。关于可穿戴设备的研讨中心在于可穿戴传感器的研讨。可穿戴设备的功用日趋强壮与其内部运用的可穿戴传感器数量的添加和功用进步休戚相关。本文依据MEMS 六轴传感器技能,意图在于规划出一套能够用于运动轨道检测的可穿戴设备。使用现有的蓝牙4.0 技能,将六轴传感器搜集到的数据实时传送到上位机,经过MATLAB 等仿真软件以及合理的数据处理,得到最接近实际的运动轨道。
可穿戴运动监测体系是可穿戴核算在体育范畴的典型使用,可穿戴运动监测体系旨在不阻碍用户运动的前提下,为用户供给接连、精确的运动监测功用。国内外学者已在该研讨范畴做了很多的作业,研制出许多相关的设备和使用。可是这些设备或许使用不是体育专家,并不能真实依据这些信息给出精确的主张,只能依据这些信息给出大致运动评价。另一方面,因为缺少大规模的数据处理才能、多维度的数据剖析才能,以及深化的数据发掘才能,即使搜集的数据里包含很多有用信息,乃至包含能够直接用于剖析运动的数据,依据数据处理发掘才能问题,也会被海量数据吞没。
鉴于此,文中提出了一种新的可穿戴体系。该体系依据MEMS 六轴传感器,经过收集物体在运动过程中发生的以六轴传感器为校准点的三轴加快度和三轴角速度,经过蓝牙4.0无线传输到装备了蓝牙USBdongle 的上位机进行数据处理和轨道模仿。
1 可穿戴运动监测体系根本原理
本文中的可穿戴运动监测体系建立于仿真运动轨道的惯性技能的基础上,首要经过运动传感器完成。本体系首要选用了俩种运动传感器:三轴加快度传感器和三轴陀螺仪传感器。加快度传感器用来丈量运动物体的加快度,作为核算速度和位移的原始数据。陀螺仪用来丈量于东物体的角速度,以此确认三维空间中运动物体的加快度传感器的参阅坐标系,有利于位移轨道的核算。
1.1 加快度传感器作业原理
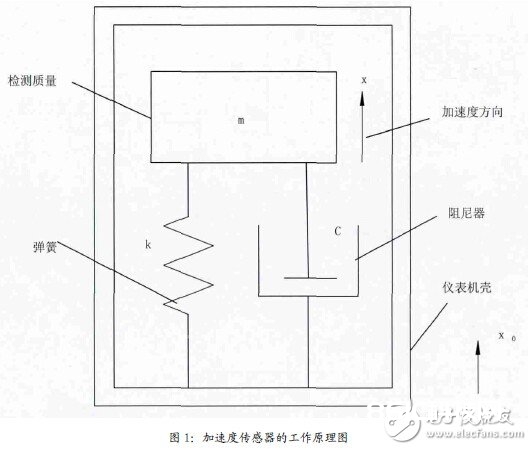
加快度是表征物体在空间运动实质的一个根本物理量,能够经过丈量加快度来丈量物体的运动状况。加快度传感器的根本原理能够由图1 阐明,其间m 是指方块的质量,k 是绷簧的刚度,c 是阻尼器与外表壳相连。
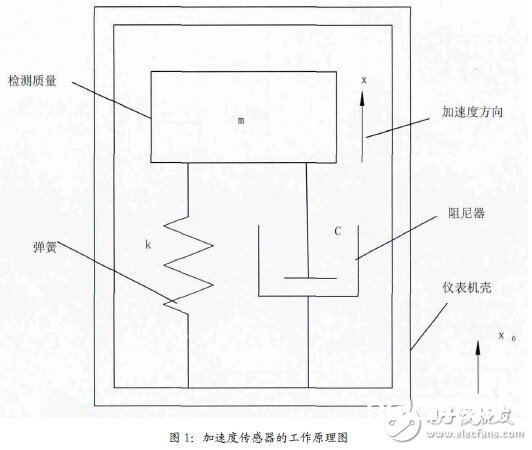
图1:加快度传感器的作业原理图
传感器基座与被测运动体相固联,因此随运动物体一同相关于惯性空间的某一参阅点作相对运动。因为检测质量块不与传感器基座固联,因此在惯性力效果下将与外表机壳发生相对位移。检测质量块感触加快度并发生于加快度成份额的惯性力,从而使绷簧发生与质量块相对位移持平的弹性变形,绷簧变形又发生与变形量成份额的反效果力。当惯性力与绷簧反效果力相平衡时,检测质量块相关于基座的位移与加快度成正比,故可经过该位移或惯性力来丈量加快度。
依据胡克定律,公式如下:
Δx=x0-x (1)
F=kΔx=ma (2)
Δx 是检测质量块的相对位移。由上式可知,检测质量块的相对位移量Δx 与加快度a成正比。
1.2 陀螺仪作业原理
陀螺仪(gyroscope) 的原理便是一个旋转物体的旋转轴所指方向在不受外力是不会改动的。就像一个陀螺在高速旋转的时分是不会倒下。可是陀螺仪作业的实收是有必要要给它一个力,使它快速旋转起来,旋转速率一般要到达几十万转,这样就能作业很长时刻。选用多种办法读取轴的信息,并将信号传给控制体系前,从而进行剖析和处理。
1.3 MEMS六轴传感器作业原理
MEMS惯性传感器选用%&&&&&%的工艺,以其共同的加工工艺差异于其他惯性传感器。长处在于可靠性高、制造成本低价、而且寿数更长。一起还具有重量轻、易集成、耗电量低、体积小、能大批量出产的特色。MEMS 传感器在同一个芯片上进行信号传输前可扩大信号,进步信号水平,减小搅扰和传输噪声。特别是同一芯片上进行A/D 转化时,更能改进信噪比。
MEMS 六轴传感器是由一个三轴陀螺仪传感器和一个三轴加快计传感器集成在同一个芯片上,能够实时输出陀螺仪和加快计读取到的数据。加快计的原理和传统的原理形似。三轴陀螺仪的作业原理则与传统的陀螺仪原理不同,传统的陀螺仪理论依据是角动量守恒定律。不断滚动的物体,他的转轴指向是不随它本来的支架的滚动而改变的。MEMS 陀螺仪是使用科里奥式力,物体被驱动,不断的来回做颈向运动,科里奥式力就不在横向来回改变。
2 可穿戴硬件体系的规划
本硬件体系的首要组成是由传感器的数据收集和蓝牙射频俩部分构成。传感器部分首要由六轴传感器MPU6050 和气压温度传感器BMP180,蓝牙芯片选用TI 公司的CC2541。MPU6050 和BMP180 经过I2C 总线和CC2541相连,将收集到的数据传输给蓝牙芯片。蓝牙芯片再经过板子上的巴伦滤波器和陶瓷天线将搜集到的数据传输出去。具体体系原理图2。将俩部分电路集成在同一个电路板在上,制作出一套开穿戴开发渠道,如图3。经过这套自行研制的开发渠道,能够做很多轨道试验,为下一步的轨道模仿供给了试验环境确保。
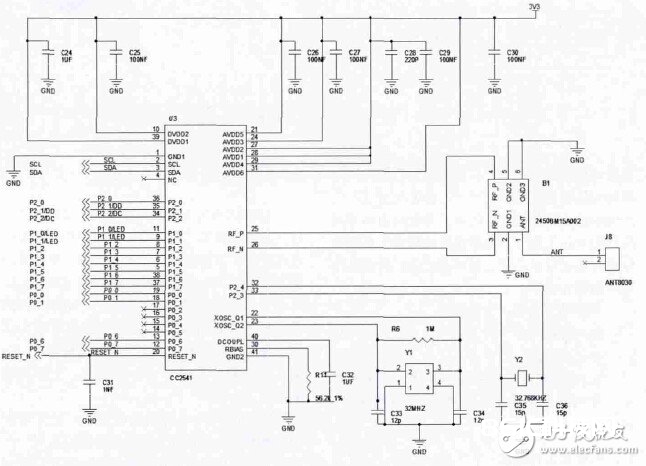
图2(a):体系电路原理图CC2541 部分
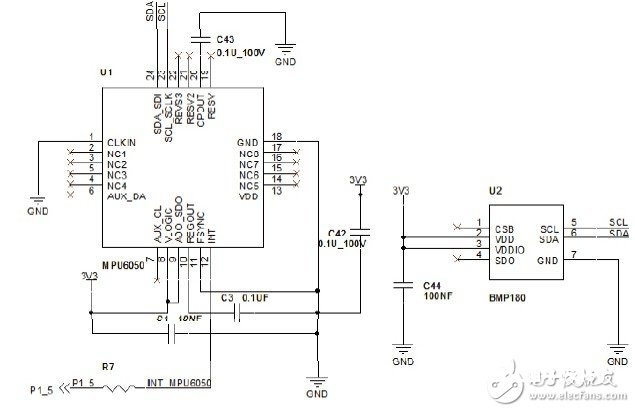
图2(b):体系电路原理图传感器部分
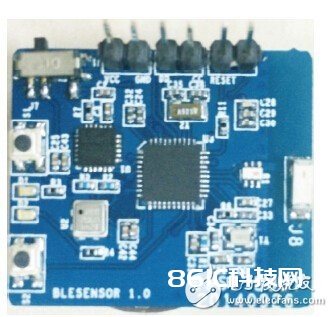
图3:可穿戴开发设备
3 运动轨道仿真体系规划
依据已有的可穿戴开发渠道,本仿真体系经过对运动轨道发生的加快度信号进行数据收集。对收集到的信号进行预处理之后完成对加快度积分以及后期的差错补偿,最终完成对运动轨道的1:1 的仿真。
仿真体系首要分为三个首要部分:六轴传感器、蓝牙和上位机处理。六轴传感器首要包含三轴加快度传感器和三轴陀螺仪,分别对运动过程中发生的加快度信号和角速度信号进行收集;蓝牙首要担任接纳六轴传感器收集到的数据,并将数据经过蓝牙信号输出给上位核算机;上位机处理首要完成数据处理的功用。
仿真体系整体结构图如图4 所示。
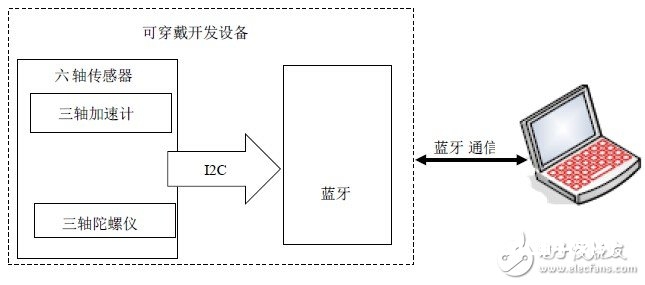
图4:仿真体系结构图
4 运动轨道仿真试验测验成果
经过蓝牙芯片,限制六轴传感器的收集速率为每秒20 组数据,一组六个值包含三个加快度值和三个角速度值,每个值包含16 个字节。将收集到的原始数据直接经过蓝牙传输发送到核算机中进行处理,然后经过MATLAB对数据进行数据处理和轨道仿真。如图5,确认坐标系。
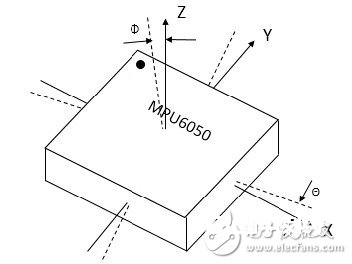
图5:传感器的坐标系示意图
4.1 停止状况
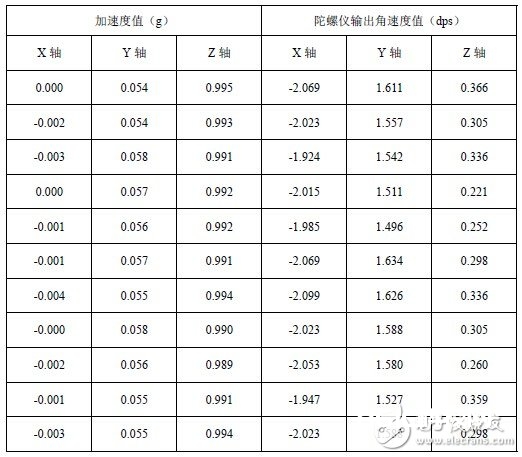
在彻底停止状况下,将可穿戴开发渠道放置水平桌面,Z 轴方向垂直于水平桌面,与重力方向重合。理论上讲,加快度值在X 轴和Y 轴输出为0,Z 轴输出为1g;陀螺仪的输出应该悉数为0。可是因为随机噪声的存在,输出值应该有必定的误差。丈量30s 得到的600组数据。挑选其间的10 组如下表。示意图如表1。
表1
4.2 匀速状况
选取XYZ 三个轴中的X 轴,沿X 轴做匀速直线运动,收集传感器得到的数据。将可穿戴开发渠道沿X 轴方向匀速移动19s,共收集到380 组数据,选其间10 组数据如表2。
表2

5 定论
本可穿戴开发渠道规划是依据MEMS 六轴传感器MPU6050 的根本原理,而且结合了蓝牙的传输技能,能够便利、快速的将运动收集到的数据快速的传输到PC 上。收集到的数据首要使用于后期可穿戴核算的研讨。





