


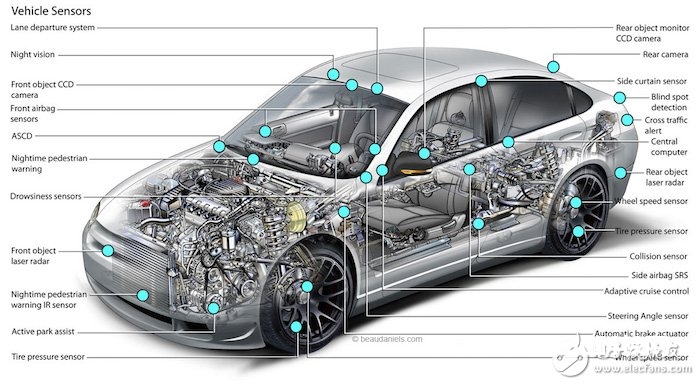
跟着轿车自动驾驭技能的开展,关于MEMS传感器的需求也在快速增加,这些传感器被运用去轿车的安全、功用相关的范畴,本文将会介绍关于自动驾驭非常重要的激光雷达和视觉图画传感器。
商场研究组织IHS Markit估计2016年该范畴商场规模为28亿美元,2015年~2022年期间,轿车运用的MEMS商场的复合年增加率将达6.9%,2022年将增加至32亿美元。

曩昔几年,MEMS传感器在强制安全体系中取得了安稳的商场,如电子安稳操控体系和胎压监测体系,这些体系在2015年期间的新款轿车中现已取得遍及。获益的MEMS供货商包括陀螺仪、压力传感器、加速度计以及前排和旁边面安全气囊传感器等。此外,轿车引擎运用的MEMS器材也正在安稳增加,首要来自于日益增加的引擎办理和尾气处理运用。据麦姆斯咨询音讯,这些范畴的MEMS出货量到2019年将到达13.4亿颗,2013年时这一数字为10.8亿颗。
激光雷达
LiDAR体系运用的是旋转激光束。宝马、谷歌、日产和苹果的无人驾驭实验车用的便是这项技能。但要想在量产车上运用,价格有必要大幅下降。业界普遍认为,再过几年这个方针就能完成。
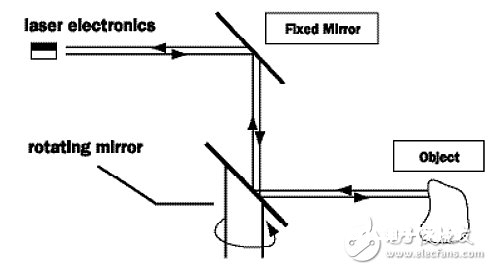
激光雷达作业原理(图片来自Velodyne)
激光雷达的作业原理是经过发射和接纳激光束来完成的。在其内部,每一组组件都包括一个发射单元与接纳单元。上图的Velodyne运用了旋转镜面的规划。
这套发射/接纳组件和旋转镜面结合在一起,能扫描至少一个平面。镜面不只反射二极管宣布去的光,而且也能把反射回来的光再反射给接纳器。经过旋转镜面,可以完成 90到180度的视角,而且大大下降体系规划和制作的复杂度,由于镜面是这里边仅有的运动组织。
脉冲光曾经被用于勘探间隔。勘探间隔的原理是依据光回来的时刻,激光二极管宣布脉冲光,脉冲光照射到方针物后反射一部分光回来,在二极管邻近装置一个光子勘探器,它可以勘探出回来来的信号,经过核算发射和勘探的时刻差就可以核算出方针物的间隔。脉冲间隔丈量体系一旦被激活就能收集到很多的点云。
假如点云中有方针物,方针物就会在点云中呈现出一个暗影。经过这个暗影可以丈量出方针物的间隔和巨细。经过点云可以生成周围环境的3D图画。点云密度越高,图画越明晰。
视觉图画传感器
现在一个很广泛的运用是将2D激光雷达与视觉传感器相结合,不过比较于激光雷达,视觉传感器低成本的特性,也让其成为了在自动驾驭解决方案中不可或缺的存在。
经过视觉传感器的图画识别技能对周边环境进行感知,关于自动驾驭而言,除了知道在什么方位存在什么物体/行人之外,从而像车辆宣布减速刹车等指令来防止事端这一功用之外,是以图画识别为根底,可以了解当时的驾驭场景,并学会处理突发事件。
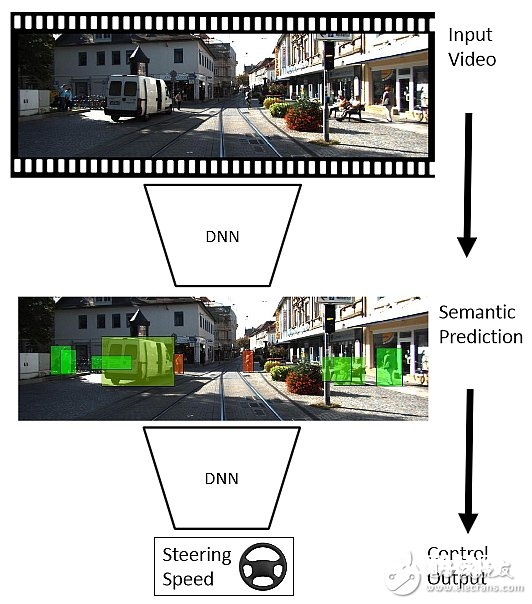
视觉传感器作业流程假如说激光雷达的难度在于怎么让其功用可以满意自动驾驭导航的需求,那么摄像头的难度则在于从感知提高到认知的这一进程。
以人眼来进行类比的话,人类驾驭员在看到行人或车辆之后,会依据看到的现象对行人或车辆的下一步举动有个预判,并依据预判来操控车辆。自动驾驭车相同需求这个「预判」的进程,而摄像头就起到调查的效果。自动驾驭轿车有必要可以对车内人员、车外行人、车邻近人们的行为进行调查、了解、建模、剖析和猜测。





