


一、规划思路
根据AVR单片机的户外勘探车大体包含机械部分,电子部分和软件部分三部分。细分为车体基体模块、主运动模块、辅运动模块,电源模块、主处理模块、运动操控模块、视频收集模块、传感器收集模块、无线通讯模块、上位机模块。
二、方案规划
1车体基体模块
车体基体模块是机器人的硬件支撑,固定着机器人的绝大部分部件,包含支架和装置座,通过铝合金胶接铆接而成。铝合金刚性好,能够承受较大的载荷,便于加工且质量有确保。
2供电模块

3主处理模块
MCU为EVK1100,完结数据处理,传感器数据收集,电机操控和无线模块协同。
承受传感器的数据,处理后,通过串口发送给无线模块,一起承受串口传递的操控信号,通过处理后,进行呼应,操控运动操控模块,完结相应动作
4 传感器收集模块
传感器模块能够根据需要搭载相关类型传感器。能够挂载GPS导航仪,进行全球范围内准确定位; 还能够挂载生命勘探器,进行更为高效的搜救活动; 还能够挂载陀螺仪,帮忙调整机器人姿势,顺利完结越障使命。
5 传感器收集模块
本机器人带着温度传感器和瓦斯传感器,视频收集模块,包含无线摄像头,接纳器,视频收集卡。
6 无线通讯模块
无线通讯模块选用高精度、高灵敏度的PTR6000无线通讯模块。该模块选用全双工作业形式,传输间隔可达500m。一端衔接上位机,一端衔接机器人。
7 上位机模块
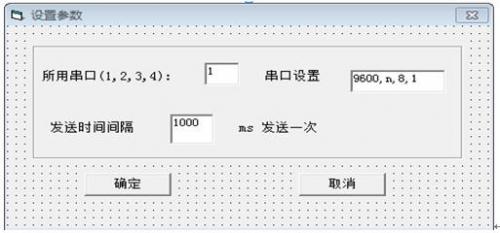
上位机端接口为一应用程序,该程序选用Microsoft公司的Visual Basic 6.0 编写,首要用于数据的接纳显现和操控信号的传递。串口通讯选用Microsoft公司的MSCoom控件,波特率设置窗口如下。
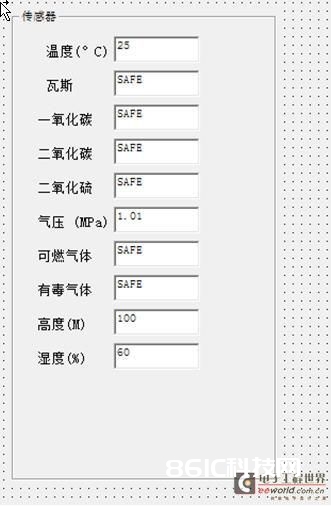
视频声响显现部分选用StkATVAP,能够显现无线摄像头收集的视频声响信号,而且能够捕获保存。传感器数据显现下位机发送的传感器信号,正如传感器部分所介绍的,还能够根据需要对其增减。
三、首要立异点
1 选用全双工无线通讯技能。
2上位机程序功能强大,人机界面友爱。
3 能够根据具体情况挑选无线或有线操控。
4 加载无线摄像头可传回视频和声响信号,且视频信号能够捕获,存储。





