


“安全设备(如急停、安全门、安全传感器、光幕、光栅、阀岛等)为何要接入安全回路中,不能够仅接入PLC的一般IO点中?”
假如运用了安全光幕等安全的输入单元,而运用一般PLC进行一个逻辑操控,整个安全体系的安全等级是不能到达一个比较高的安全等级的。因为一般PLC犯错的几率会比安全操控器高许多,因而假如需求一个安全体系的整个回路到达比较高的安全等级来进行安全防护,整个体系回路中的一切元器件都需求到达比较高的安全等级,包含输入传感器、操控单元以及输出执行器。
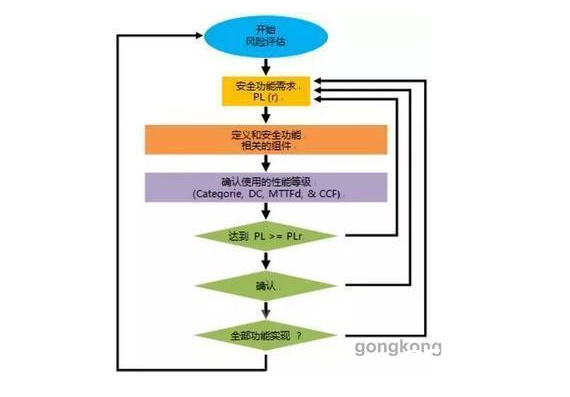
首要,依据机器安全国际规范ISO 13849-1“安全相关操控部分的体系规划办法 (SRP/CS)”,对应的国家规范GB/T 16855.1 2008中的规则,先对机器一切风险进行评价,鉴定出PLr (Performance Level requirement整个安全体系所需求的安全等级),再进行安全规划,经过对运用元器件的安全功用等级的鉴定,来确认终究安全体系的PL等级,终究看是否到达了PLr的要求。
安全回路规划:鉴定完PLr之后,就针对不同的风险及其风险程度进行安全回路的规划,包含输入元件(急停,双手按钮,安全光幕,安全光栅,安全门锁等),操控单元(操控器等),输出元件(继电器,接触器,阀等)。核算总的PL:针对不同的安全功用,核算出整个安全回路总的PL,看终究的成果是否大于等于PLr, 假如满意要求,便是一个适宜的安全规划。假如不满意要求,需求从头进行规划或许更改一些元器件使体系总的PL大于等于PLr。
假如依据PL的元件结合一系列的操控体系SRC/PS,则总的PL也能够核算并考虑到以下:a) 运用元件的最低功用等级 (PL low)b) PL元件和元件的数量 = N low即整个体系要到达某个PL值,整个体系每个元件的PL值至少都要大于等于这个值。
Sample:假定一个体系的最低功用等级为PLc, 一共有4个元件,则整个体系的PL值为PLb;假如一个体系最低功用等级为PLd,一共有3个元件,则整个体系的PL值为PLd。假定一个工位有机器人来取料,然后进入其他工位进行其他操作,人需求常常进出机器人取料的当地放置工件。
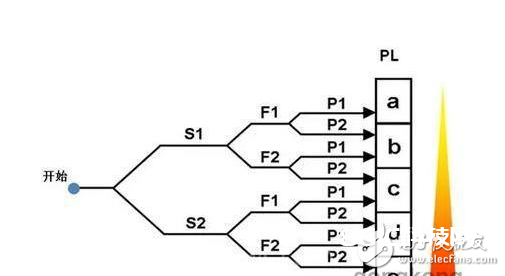
首要鉴定PLr 因为机器人打到人会形成重伤,所以挑选S2,因为操作工需求频频进入这个风险区域,因而选F2,假如机器人打过来,假如速度比较慢,依据操作工的熟练程度以及反响,是能够逃离这个风险的,挑选P1, 终究PLr=PLd。
这样,依据总体系PL 简易预算表,安全规划需求运用输入和操控元件都需求至少PLd 以上的元件才能够。因为一般可编程操控器的PL 等级是不会超越PLc,因而,整个体系的安全等级是不能满意PLr=PLd 的要求,因而是不符合安全规范的规划,有必要运用PLd 以上的安全操控器。
至于单个元件的操作功用等级PL,有些能够从元件的参数表内找到,例如安全光幕,安全扫描仪,安全PLC 等。而有些元件是要经过核算来得到的,例如接触器,安全继电器模块等。其间,子体系的PL 值能够经过SISTEMA 软件进行核算和评价并生成相应的陈述。





