伺服电机内部的转子是永磁铁,驱动器操控的U/V/W三相电构成电磁场,转子在此磁场的效果下滚动,一起电机自带的编码器反应信号给驱动器,驱动器依据反应值与目标值进行比较,调整转子滚动的视点。伺服电机的精度决议于编码器的精度(线数)。
沟通伺服电动机的结构首要可分为两部分,即定子部分和转子部分。其间定子的结构与旋转变压器的定子根本相同,在定子铁心中也安放着空间互成90度电视点的两相绕组。其间一组为激磁绕组,另一组为操控绕组,沟通伺服电动机是一种两相的沟通电动机。 沟通伺服电动机运用时,激磁绕组两头施加稳定的激磁电压Uf,操控绕组两头施加操控电压Uk。当定子绕组加上电压后,伺服电动机很快就会滚动起来。 通入励磁绕组及操控绕组的电流在电机内发生一个旋转磁场,旋转磁场的转向决议了电机的转向,当恣意一个绕组上所加的电压反相时,旋转磁场的方向就发生改动,电机的方向也发生改动。

沟通伺服电机的分类及其特色
长期以来,在要求调速功能较高的场合,一向占有主导地位的是运用直流电动机的调速体系。但直流电动机都存在一些固有的缺陷,如电刷和换向器易磨损,需常常保护。换向器换向时会发生火花,使电动机的最高速度受到限制,也使运用环境受到限制,并且直流电动机结构杂乱,制作困难,所用钢铁资料耗费大,制作本钱高。而沟通电动机,特别是鼠笼式感应电动机没有上述缺陷,且转子惯量较直流电机小,使得动态呼应更好。在相同体积下,沟通电动机输出功率可比直流电动机进步10﹪~70﹪,此外,沟通电动机的容量可比直流电动机造得大,到达更高的电压和转速。现代数控机床都倾向选用沟通伺服驱动,沟通伺服驱动已有替代直流伺服驱动之势。
异步型
异步型沟通伺服电动机指的是沟通感应电动机。它有三相和单相之分,也有鼠笼式和线绕式,一般多用鼠笼式三相感应电动机。其结构简略,与同容量的直流电动机比较,质量轻1/2,价格仅为直流电动机的1/3。缺陷是不能经济地完成规模很广的滑润调速,有必要从电网吸收滞后的励磁电流。因此令电网功率因数变坏。
这种鼠笼转子的异步型沟通伺服电动机简称为异步型沟通伺服电动机,用IM表明。
同步型
同步型沟通伺服电动机虽较感应电动机杂乱,但比直流电动机简略。它的定子与感应电动机相同,都在定子上装有对称三相绕组。而转子却不同,按不同的转子结构又分电磁式及非电磁式两大类。非电磁式又分为磁滞式、永磁式和反应式多种。其间磁滞式和反应式同步电动机存在功率低、功率因数较差、制作容量不大等缺陷。数控机床中多用永磁式同步电动机。与电磁式比较,永磁式长处是结构简略、运转牢靠、功率较高;缺陷是体积大、发动特性欠佳。但永磁式同步电动机选用高剩磁感应,高矫顽力的稀土类磁铁后,可比直流电动外形尺度约小1/2,质量减轻60﹪,转子惯量减到直流电动机的1/5。它与异步电动机比较,因为选用了永磁铁励磁,消除了励磁损耗及有关的杂散损耗,所以功率高。又因为没有电磁式同步电动机所需的集电环和电刷等,其机械牢靠性与感应(异步)电动机相同,而功率因数却大大高于异步电动机,从而使永磁同步电动机的体积比异步电动机小些。这是因为在低速时,感应(异步)电动机因为功率因数低,输出相同的有功功率时,它的视在功率却要大得多,而电动机首要尺度是据视在功率而定的。

数控机床上运用的沟通电机一般都为三相。分为:异步型和同步型沟通伺服电机。
从树立所需气隙磁场的磁势源来说,同步型沟通电机分:电磁式及非电磁式两大类。非电磁式有磁滞式、永磁式和反应式多种。磁滞式和反应式同步电机存在功率低、功率因数差、制作容量不大等缺陷。
永磁式同步电机:


故数控机床进给驱动体系多选用永磁式同步电机。
异步型沟通伺服电机:
与同容量的直流电机比较

故异步型沟通伺服电机用在主轴驱动体系中。
同步和异步的差异:
(1)沟通同步电机:转子由永磁资料制成,滚动后,跟着定子旋转磁场的改变,转子也做相应频率的速度改变,并且转子速度等于定子速度,所以称“同步”。
(2)沟通异步电机:转子由感应线圈和铁心资料构成。滚动后,定子发生旋转磁场,磁场切开转子的感应线圈,转子线圈发生感应电流,从而转子发生感应磁场,感应磁场跟从定子旋转磁场的改变,但转子的磁场改变永久小于定子磁场的改变。在沟通异步电机的要害参数转差率表明转子与定子的速度差的比率。
1、永磁式沟通同步电机
结构:电机由定子、转子和检测元件组成。
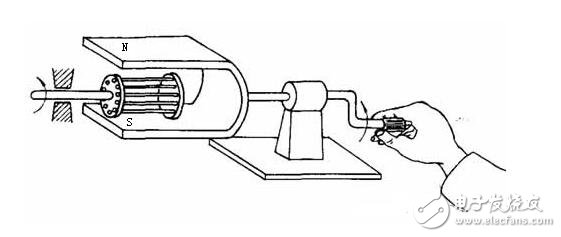
两点启示:
榜首、有一个旋转的磁场;
第二、转子跟着磁场滚动。
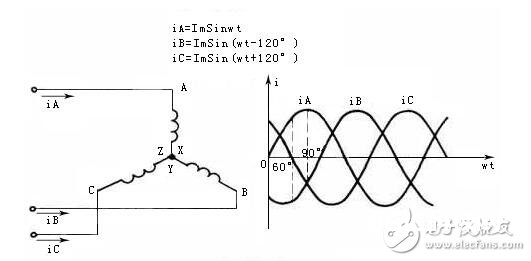
三相对称电流
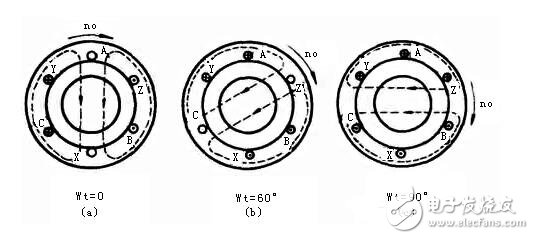
三相电流发生的旋转磁场(p=1)
永磁式沟通同步电机作业原理和功能

其间,nr为转子旋转转速;ns为同步转速;θ为转子磁极的轴线与定子磁极的轴线夹角;f1为沟通电源频率(定子供电频率);p为定子和转子的极对数。
2、沟通主轴电机
定子三相绕组通三相沟通电,发生旋转磁场,磁场切开转子中的导体,导体感应电流与定子磁场相效果发生电磁转矩,推进转子滚动,转速nr为

其间,ns为同步转速;f1为沟通电源频率(定子供电频率);s为转差率,s=(ns-nr)/ns;
p为极对数。
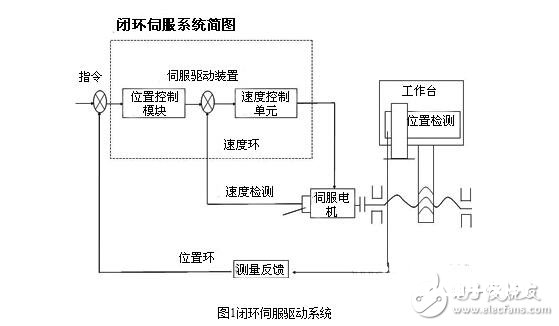
沟通伺服电机的闭环驱动
闭环操控体系是选用直线型方位检测设备(直线感应同步器、长光栅等)对数控机床作业台位移进行直接丈量并进行反应操控的方位伺服体系,其操控原理见图1所示。这种体系有方位检测反应电路,有时还加上速度反应电路。

1. 沟通同步伺服电机的品种
励磁式、永磁式、磁阻式和磁滞式
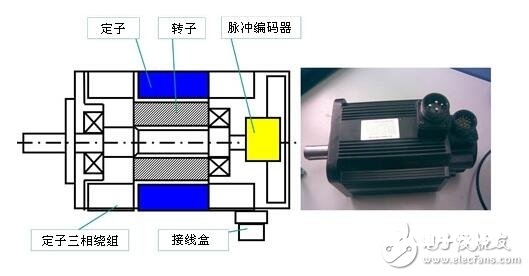
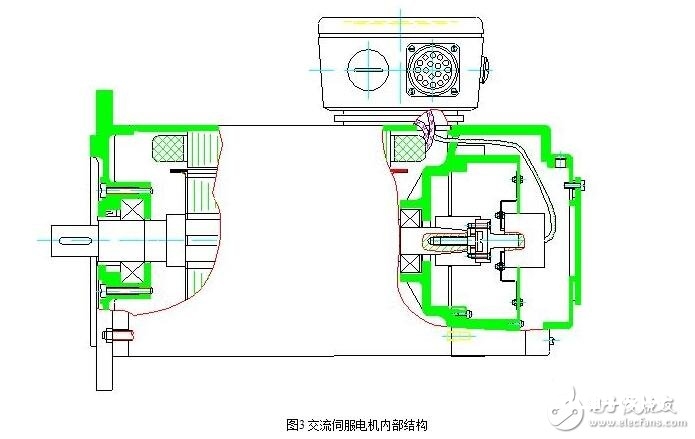
2. 永磁沟通同步伺服电机的结构
电机由定子、转子和检测元件组成。见图2所示。其内部结构见图3所示。
3.永磁沟通同步伺服电机作业原理和功能
当三相定子绕组通入三相沟通电后,在定子、转子之间发生一个同步的旋转磁场,设转子为永久磁铁,在磁力效果下,使转子跟从旋转磁场同步滚动。
只需负载不超越必定极限,就不会呈现沟通同步电动机失步现象,这个负载最大极限称为最大同步扭矩。
用削减转子惯量,或让电动机先低速再进步到所要求的速度等办法,处理同步电机发动困难的问题。
首要参数:额外功率、额外扭矩、额外转速等。
沟通伺服电机的长处:
◆ 动态呼应好;
◆ 输出功率大、电压和转速进步。
4. 永磁沟通同步伺服电机的调速办法
进给体系常运用沟通同步电机,该电机没有转差率,电机转速为

调速办法:变频调速
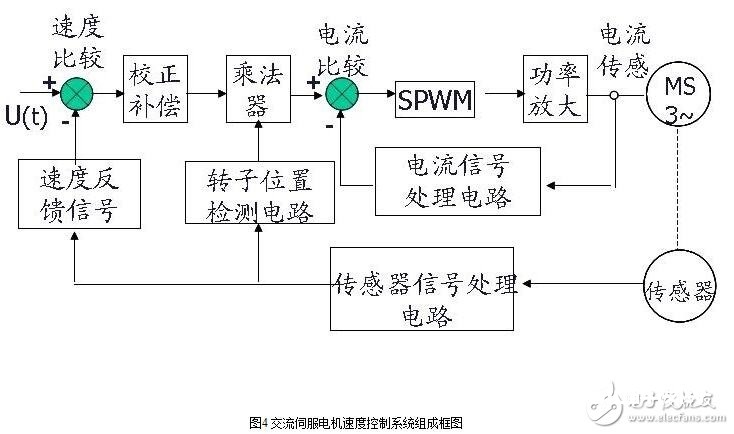
5. 沟通进给伺服电机的速度操控体系
体系组成:速度环、电流环 、SPWN电路、功放电路、检测反应电路。见图4所示。