


一、导言
三相可控硅桥式半控整流电路能够在交流电源电压不变的情况下,经过改动可控硅的触发电路操控角来完结对整流电路直流输出电压的操控,这种电路在中等容量的整流设备或不要求可逆的电力拖动体系中运用较为广泛。传统的三相桥式半控整流电路需求三套独立的模拟式触发器来触发可控硅,因为模拟式触发器存在着线路杂乱、调整困难、牢靠性低的问题,为此,本文提出一种用80C196KC单片机组成的数字触发器电路,操控电路大为简化,所发生的触发脉冲具有移相规模宽、操控精度高,动态呼应快、安稳牢靠的特色,其性能指标优于模拟式触发器。
二、电路组成及原理剖析
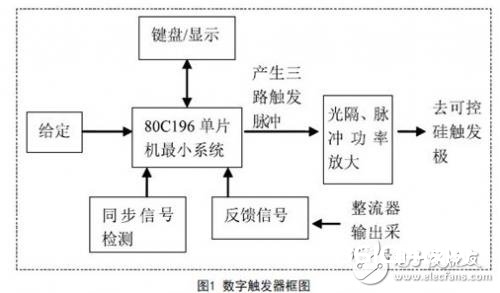
1.三相可控硅半控桥式整流电路的数字触发器由80C196KC单片机最小体系、同步检测电路、脉冲功率放大电路组成,如图1所示。单片机8 0 C 1 9 6 K C、锁存器、27C256程序存储器、62C256数据存储器构成最小体系。80C196KC为Intel公司16位高性能单片机,它的功耗极低,除正常作业外,还能够作业在待机和掉电两种节电方法。其作业速度比51单片机高数倍。总线宽度为8/16位可选,而内部宽度总是16位的。80C196KC内含 8路10位A/D转化器,512字节RAM,2个硬件守时/计数器,一个监督盯梢守时器,晶振为12MHz.单片机依据给定与反应信号的差值,经运算后构成操控角为α的移相脉冲从HS0.0~0.2口脚输出。
2.同步信号检测由光电阻隔、比较器和整形电路组成(如图2)。由同步变压器送过来的线电压UAC的过零点时,在光电阻隔器的输出端发生一个方波,经反相器U1整形、RC电路微分后发生一个脉冲作为外部中止信号加到80C196KC的EXTINT端,完结触发脉冲与电源同步。为了简化电路,本体系选用了相对触发方法,只需求单相同步即可。

3.脉冲功率放大电路。如图3所示,为了完结对大电感负载的牢靠触发,本触发电路运用脉冲序列触发方法。从单片机端口HS0.0~0.2输出的脉冲送入由555组成的脉冲簇构成电路,经过场效应管功率放大和脉冲变压器阻隔后,输出到可控硅的触发极。

三、操控角算法
可控硅操控角α由下式求出:

大电感负载时,三相半控桥式整流电路输出电压Ud与操控角α的关系为:

上式标明三相半控桥式整流电路输出电流Id与操控角α对错线性的,而(1)式是建立在线性化基础上的,所以有必要经过下面的式子予以批改:

为了简化程序,选用U给定-ω-α′查表方法取得操控角α。因为单片机的A/D转化器为10位的,给定电压5V经过A/D转化后为3FFH=1023,若分红51档,则:

所以ω=33H正好对应给定电压U=5V;当U=4.9V时,二进制数为1003H,则:

其他类推,即正好0 。 1 V对应0 1 H,0.2V对应02H,…等,这样便于查表。
使用一个过零检测电路在同步电压UAC从负半波到正半波过零时间发生同步脉冲,因为UAC落后于相电压UA30°,所以同步脉冲呈现的时间正好是A 相电压的天然换相点,A、B、C各相的天然换相点互相相差120°,当A相的天然换相点找到后,其他B、C相的天然换相点互相相差时间为T/3,T为前次测到的电压周期,可用丈量相邻两个同步脉冲的时间距离得到。
设2 T、1 T分别为本次同步脉冲呈现的时间和前次脉冲呈现的时间。当1 T 》 1 T时,则:

在每一相的天然换相点呈现时间起动软件守时器(其整守时间为αt ),软件守时器届时时间即为该相宣布触发脉冲(操控角为α)的时间。
三相桥式半控整流电路带大电感负载时的移相规模为0~180°。当操控角α大于120°时,相邻两个可控硅触发电路或许一起作业,所以在模拟式触发电路中每个可控硅有必要有自己的触发电路。因为一个单片机只能组成一个数字触发电路,为了使三相电路能共用一个触发电路,咱们有必要将操控角α约束在120°以内。这能够经过改动触发次序的方法来完结。
当α1 2 0°时,按理应在120°~240°时VT1,今后每隔120°触发VT2、VT3,但也能够0~120°时以α′=α-120°触发VT3,过120° 今后以α′触发V T 1.明显两者是等效的,但这样处理后,操控角能够约束在120°以内,就能够共用一个触发器了。
四、软件规划
数字触发器的程序由主程序、同步电路中止处理子程序、软件守时中止处理子程序、键盘与显现处理子程序等四个模块组成。为了进步指令运转速度,本电路一切程序选用汇编语言编写,并且选用了模块化结构,为程序的编写和修正供给了便利。本文扼要介绍前三个模快。
1.主程序首要完结80C196单片机的仓库指针规划、清作业单元、设置初始值、敞开中止、键盘扫描等的初始化作业,框图如图4所示。

2.同步电压中止子程序。当同步电压由正半波到负半波过零时间发生一个尖脉冲,加到单片机的EXTINT端引发外部中止。
在中止服务子程序中完结置视点初值,丈量及核算电源电压周期,设置第一个时间距离,发动软件守时器0和守时器1.软件守时器0中止处理子程序。操控角α用一个软件守时器发生守时时间来取得。当同步脉冲呈现后,此即为A相的天然换相点(即A相α=0的时间),此刻将与操控角对应的时间置入软件守时器0.当软件守时器届时后,一方面宣布A相的触发脉冲,另一方面又将T/3时间置入软件守时器0;当软件守时器届时,一方面宣布B相的触发脉冲,另一方面又将T/3 时间置入软件守时器0;当软件守时器届时,宣布C相的触发脉冲,此刻不行再将T/3时间置入软件守时器0.很明显,当给定电压固守时,A、B、C三相的触发脉冲一定是相差T/3的,所以在A相的同步脉冲呈现后,将αt置入软件守时器0,软件守时器0届时时间所便是所需的A相脉冲的操控角α。在子程序中完结给定电压与反应电压的采样,操控角α核算,标度改换以及将操控视点数值送到显现缓冲区等作业。程序框图略。图5是同步中止子程序框图。


选用16位单片机80C196KC体系,器材削减、结构紧凑,整个触发器电路大为简化,并且,因为单片机运算速度快,采样与显现能够在两次同步信号之间完结并且每次同步信号都被采样,因此中止程序能够依照最新的采样数据调整触发脉冲的移相角。试验标明,该触发器的动态特性好、操控精度高。






