


运用图形化编程言语LabVIEW及其PID工具包能便利、高效地进行PID操控器规划。若将其与传感器、信号调度电路、数据收集卡等硬件设备杰出结合,即可构成根据虚拟仪器的操控体系。
虚拟仪器操控体系中操控战略和操控算法的软件完结是测控体系重要组成部分,是测控体系中操控部分的核心内容。本文首要详细地论述测控体系中增量型PID操控器的规划原理及程序完结,然后介绍将增量型PID操控器运用到根据虚拟仪器的电压操控体系中的计划。
电压测控体系软件操控器原理与完结
1 PID操控原理
PID操控器是一种线性操控器。在接连操控体系中,用输出量y(t)和给定量r(t)之间的差错时刻函数的份额、积分、微分线性组合构成操控量u(t)。其框图如图1所示。
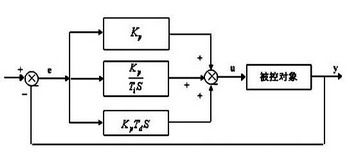
图1 ID操控器方框图
为了完结核算机操控,则须将接连PID算式离散化,变为数字PID算式。实践运用中选用后向差分法作为离散化办法,可由安稳的模仿操控器得到安稳的数字操控器。当采样周期T远小于信号改动周期时,作如下近似(T满意小时,如下迫临适当准确,被控进程与接连体系十分相似)。
(1)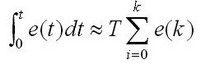
(2)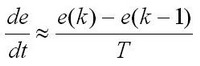
(3)
(4)
式中,Kp为份额系数,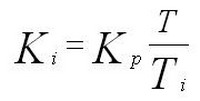 为积分系数,
为积分系数, 为微分系数。
为微分系数。
2 增量型PID操控器程序完结
LabVIEW的PID工具包中完结方位型PID算法详细如下:
差错:e(k)=sp-pv (5)
份额环节: (6)
(6)
积分环节: (7)
(7)
微分环节: (8)
(8)
sp—设定点即被控进程变量指定的抱负值,pv—进程变量即被操控的体系参数。因为sp的值或许随时改动,为了防止sp骤变形成的影响,微分环节选用对pv的偏微分,而不是一般用到的差错的偏微分。将式(4)的微分部分作如下变形:
(9)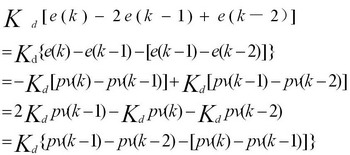
得到增量型PID算法的输出表达式为:
(10)
(11)
所得相应流程图如图2所示。
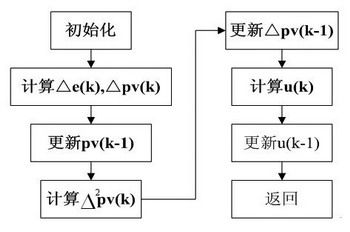
图2 增量型PID算法流程图
电压测控体系硬件构成
此体系所触及的DC/DC变换器是额定功率为55kW、峰值功率为60.5kW的单项DC/DC变换器。它的正常输入电压为0~600V,输出电流为0~216A。
DC/DC变换器输入电压测控体系是单输入单输出体系,因而选用PCI总线结合数据收集板卡即PCI-DAQ形式的虚拟仪器构建该操控体系,选用霍尔电压传感器取得现场电压信号。数据收集卡选用NI公司最新推出的高速高精度PCI-6251M板卡。因为输入输出都有各自的守时/操控及缓存芯片,因而只用一块卡就可一起完结操控体系的输入输出。
要完结对DC/DC变换器输入电压的杰出操控,有必要确保收集卡输出的操控脉冲与执行机构的输出之间能够完结准确的同步。根据此要求,选用步进电机后边带调压器作为收集卡数字I/O输出的执行机构。
运用NI公司的集成测验环境所规划的根据虚拟仪器的DC/DC变换器输入电压测控体系如图3所示。
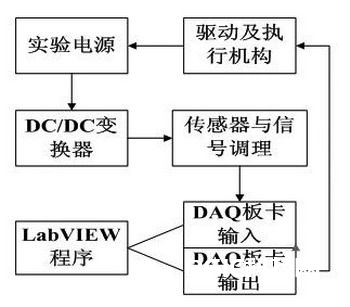
图3 电压测控体系结构框图
电压测控体系的仿真与完结
1 执行机构数学模型
步进电机是一种将电脉冲转化为角位移的执行机构,能够经过操控脉冲个数来操控角位移量,然后到达准确定位的意图。为了运用PID操控器来操控它,以三相反应式步进电机为例推导得出其在单相励磁的情况下的传递函数。
(12)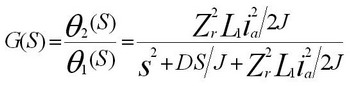
其间J 、Zr分别为转子转动惯量及齿数;ia为A相电流;L为绕组的电感;D为电动机的黏滞阻尼系数。取L(H)= 0.01002,Zr=40,J( kg·m2)=1.08,D=0.031。
希望角位移输出θ=1.5,取ia=1.0,这样得到步进电机的传递函数为:
(13)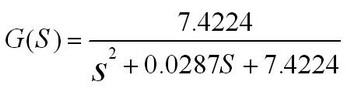
可见得出的步进电机为二阶体系模型。
选用的变压器为带触头的线性调压器,即调压器的传递函数为常数。步进电机的输出视点经过机械传动转换为触头的直线位移。经过触头方位的改动来改动匝数比,然后改动输出电压,起到调压的意图。因而整个执行机构为一个二阶体系。
2 仿真成果与剖析
用在LabVIEW 中的方位型的基础上规划的增量型PID操控器对传递函数为式(13)所示的二阶体系执行机构进行仿真。得到的阶跃呼应曲线仿真成果如图4所示。
从仿真曲线咱们能够看到,选用增量型PID操控战略时,能很快就到达步距角,动摇较小,操控平稳,满意了测控体系的要求。
3 测控体系程序完结
因为LabVIEW的运转环境Windows是一个抢先制多任务操作体系,其他运转的运用程序会影响到操控回路的速度。为了确保收集操控进程不受用户操作的影响故运用硬件守时操控回路,能够得到准确的模仿输入采样率和输出改写率。PID VI运用体系时钟来核算循环周期时刻。因为操作体系时钟最小长度为1ms,当循环周期小于1ms根据虚拟仪器的增量型PID操控体系规划时有必要清晰指定dt的值。
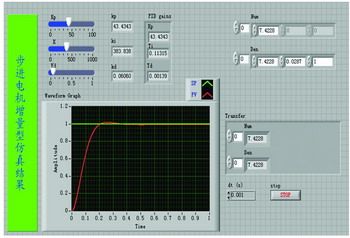
图4 增量型PID操控器仿真成果
在硬件时操控回路中,AI Timing VI和AO Timing VI均选用简略时钟信号守时。模仿输入VI以设置的采样率收集电压信号,模仿输出VI以设定的改写率改写输出通道的值。在程序中调用了参数自整定子VI能够很便利地得到满意最佳操控功能的PID参数。所规划的单通道电压收集操控程序如图5所示。
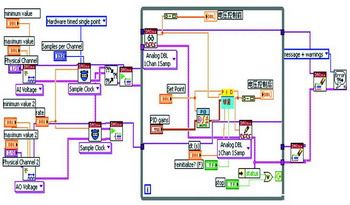
图5 单通道电压收集操控程序框图
结束语
根据LabVIEW软件渠道开发的增量型PID操控器能较好地完结DC/DC输入电压测控的基本要求。仿真剖析标明,增量型PID操控器具有好的操控作用。这也进一步证明了虚拟仪器在开发测控体系方面的潜力。运用LabVIEW及其PID工具包能便利、高效地进行PID操控器的规划与工程完结并用于各种实践的工业与自控环境中。






