


导言
步进电机广泛应用于对精度要求比较高的运动操控体系中,如机器人、打印机、软盘驱动器、绘图仪、机械阀门操控器等。现在,对步进电机的操控主要有由涣散器材组成的环形脉冲分配器、软件环形脉冲分配器、专用集成芯片环形脉冲分配器等。涣散器材组成的环形脉冲分配器体积比较大,一起因为涣散器材的延时,其可靠性大大下降;软件环形分配器要占用主机的运转时刻,下降了速度;专用集成芯片环形脉冲分配器集成度高、可靠性好,但其适应性受到限制,一起开发周期长、需求费用较高。
步进电机操控
步进电机是数字操控电机,它将脉冲信号转变成角位移,即给一个脉冲信号,步进电机就滚动一个视点,因而十分适合于单片机操控。步进电机可分为反应式步进电机(VR)、永磁式步进电机(PM)和混合式步进电机(HB)。 步进电机差异于其他操控电机的最大特点是,它是经过输入脉冲信号来进行操控的,即电机的总滚动视点由输入脉冲数决议,而电机的转速由脉冲信号频率决议。 步进电机的驱动电路依据操控信号作业,操控信号由单片机发生。其基本原理效果如下:
(1)操控换相次序 通电换相这一进程称为脉冲分配。例如:混合式步进电机的作业方法,其各相通电次序为A-B-C-D,通电操控脉冲有必要严厉依照这一次序别离操控A,B,C,D相的通断,这便是所谓脉冲环形分配器。
(2)操控步进电机的转向 假如给定作业方法正序换相通电,步进电机正转,假如按反序通电换相,则电机就回转。
(3)操控步进电机的速度 假如给步进电机发一个操控脉冲,它就转一步,再发一个脉冲,它会再转一步。两个脉冲的距离越短,步进电机就转得越快。
L297和L298组成的步进电机驱动电路
SGS公司的L297单片步进电机操控集成电路适用于双极性两相步进电机或四相单极性步进电机的操控,与两片H桥式驱动芯片L298组合,组成完好的步进电机固定斩波频率的PWM恒流斩波驱动器。
L297发生四相驱动信号,用以操控双极性两相步进电机或四相单极性步进电机,能够选用半步、两相励磁、单相励磁三种作业方法操控步进电机,并且操控电机的片内PWM斩波电路答应三种作业方法的切换。运用 L297杰出的特点是外部只需时钟、方向和作业方法三个输入信号,一起L297主动发生电机励磁相序减轻了微处理器操控及编程的担负。L297具有DIP20和SO20两种封装方法,可用于操控集成桥式驱动电路或分立元件组成的驱动电路。
L297主要由译码器、两个固定斩波频率的PWM恒流斩波器以及输出逻辑操控组成,其内部结构图如图1所示。
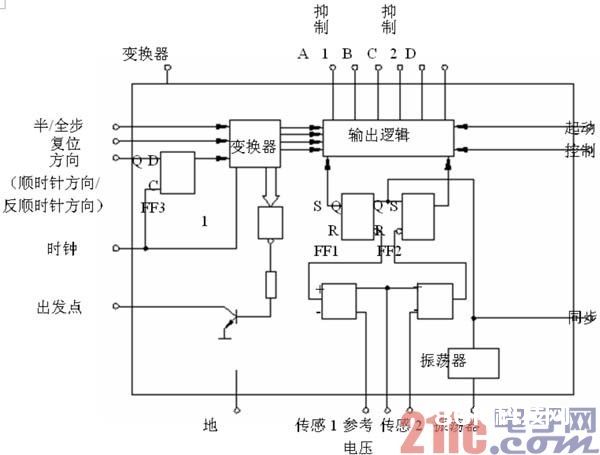
图1 L297内部结构框图
L297另一重要组成是PWM斩波器操控相绕组电流,完成恒流斩波操控,以取得杰出的转矩-频率特性。每个斩波器由一个比较器、一个RS触发器以及外接采样电阻组成(见图2)内部设有一公共振荡器,向两个斩波器供给触发脉冲信号,脉冲频率是由外接的RC网络决议,当
时振荡器脉冲使触发器置“1”,电机绕组相电流上升,采样电阻RS的电压上升到基准电压Vref时,比较器翻转,使触发器复位,功率晶体管关断,电流下降,等候下一个振荡器脉冲的到来。这样,触发器输出是恒频的PWM信号,调制L297的输出信号,绕组相电流峰值由Vref决议。CONTROL信号用以挑选斩波信号操控。当它为低电平时,斩波信号效果于两个制止信号,高电平时,斩波信号效果于A、B、C、D信号。前者适用于单极性作业方法,而关于双极性作业方法的电机,这两种操控方法都能够选用。
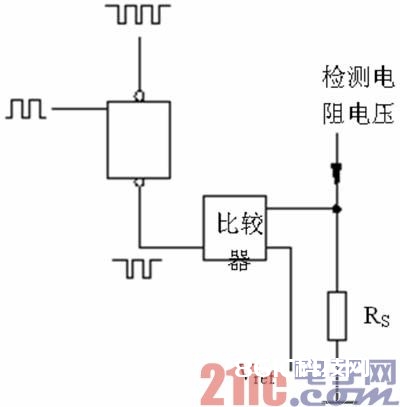
图2 斩波器电路
运用L297的SYNC引脚可完成多个L297同步作业,其衔接方法如图3所示,只将RC网络接于一芯片上,而其他芯片的OSC引脚均接地,这样可防止接地杂波的引进问题。
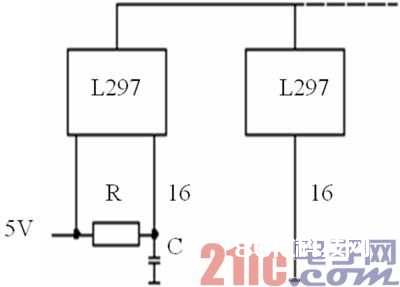
图3 多个L297同步作业
SGS公司的L298芯片是一种高电压、大电流双H桥功率%&&&&&%,可用来驱动继电器、线圈、直流电机和步进电机等理性负载。它具有两按捺输入来使器材不受输入信号影响。每桥的三极管的射级是衔接在一起的,相应的外接线端可用来衔接外设传感电阻。可安顿另一输入电源,使逻辑能在低电压下作业。
选用L297和L298完成的步进电机驱动电路见图4,该电路为固定斩波频率的PWM恒流斩波驱动方法,适用两相双极性步进电机,最高电压46V,每相电流可达2A。用两片L298和一片297合作运用,可驱动更大功率的两相步进电机。
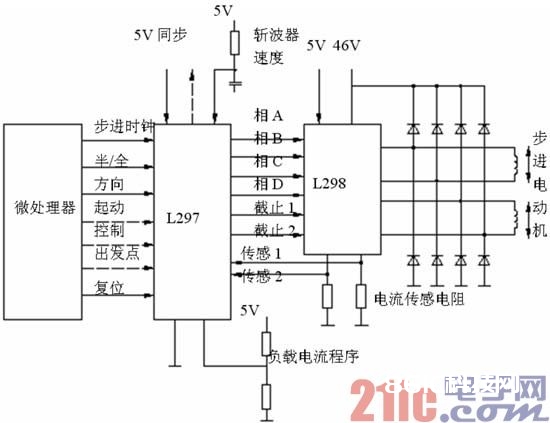
图4 L297和L298的步进电机驱动电路图
软件规划
当程序进入到非程序区,只要在非程序区设置阻拦办法,使程序进入圈套,
然后逼迫程序回到初始状况。如对CPU的RST指令对应的字节码为0FFH,假如不必的程序存储区预先写入0FFH,则当程序因搅扰而“飞”到该区域履行代码时,就相当于履行1条RST指令,然后到达体系复位的意图。
选用C言语编写程序代码
PO_ 0=1; //CW 方向
PO_ 1=1; //HALF 半步
PO_3=1; //ENABLE 使能
PO_ 2=1; //RESET 复位
PO_7=1; //CLOCK 时钟
TMOD=O X O1; //TI选用定时器
THO=(一4000/256);
TLO=一(400000256);
TRO二I;
for(;;)
{
THO=一(4000/256);
TLO=一(4000% 256);
do{}while(! TFO);
PO_ 7=! PO_ 7; CLOCK 输出时钟
TFO=O;
}
结语
选用此规划的步进电机驱动体系,在驱动二相或四相混合式步进电机时运动平稳,速度快,噪音低,操控精高,并且可选整步半步驱动。外观选用铝镁合金,散热性好,价格低廉,可广泛应用于需求驱动电流小于2A的混合式两相或四相步进电机的体系中。






