


双排传感器的优势
现在,大多数智能车选用单排传感器的路途检测办法,这种办法取得的路途信息少,对智能车的状况和路途的状况都不能很好地差异,构成操控上的费事。为了补偿缺乏,构成了大前瞻的单排传感器的路途检测办法,这种办法检测的间隔更远,能够更早地判别出路途的走向,在必定程度上补偿了检测精度低的缺陷,但也无法有效地区别智能车状况与路途状况。
竞赛的车模可选用摄像头或传感器的办法进行路途信息检测,咱们的车模选用的是双排红外的循迹办法,选用大前瞻双排传感器能够得到更多的赛道信息,更早地采纳战略处理,构成更好的行车轨道。是选用杂乱的摄像头计划的一种代替办法。
能够在直道中完成安稳操控,加快顺利的才干;在S弯中以小曲线的办法跋涉,削减跋涉路线和舵机调整次数。在大弯中完成提早转弯,切内弯的效果。尤其是在转弯方面,通过前后排共同对弯道的猜测,到达延伸物理辨认间隔的才干,然后做出提早的动作,削减因为检测间隔近而带来的负面影响,到达上述效果。
传感器阵列布局
图1中仅以承受管暗示传感器方位。
布局办法阐明
前排传感器伸出间隔较远,小车中心违背黑线后,会在前排传感器上发生较大偏移量。
后排传感器伸出间隔较近,小车中心违背黑线后,会在后排传感器上发生较小偏移量。
运用前后排传感器对小车偏移时不同的敏感度对小车进行操控。
为了使前后排表现出更清晰的分工和收集到更远处的信息,咱们把前排传感器歪斜约45o角,使前排的前瞻间隔更大,更能表现出前排的优势和特色。
直道辨认办法、操控战略
直道辨认办法
(1)选用此种办法布局双排红外,关于直道的判别办法可有以下5种物理办法,每种办法运用的机遇列在表后。

第一种直道状况(图2)
在左转大弯后,出弯时最或许呈现的前后排传感器检测到黑线时的组合状况。适用于左转 90°弯、180°弯。提早得到出弯信息,舵机向左滚动较小视点,并在此刻采纳加快动作,起到补偿前瞻缺乏的效果。此状况在赛道的s弯呈现时,不满意直道的第二种辨认办法,故不会加快。
第二种直道状况(图3)
此状况是对第一种状况的再承认,左转大弯并通过第一种状况后,再阅历此种状况,可承认无误前方为直道,持续进步小车的加快才干。操控程序由弯道程序切换到直线安稳程序。
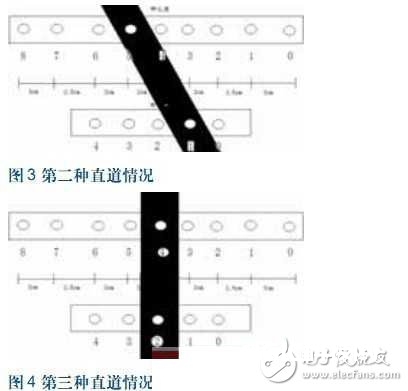
第三种直道状况 (图4)
此刻采纳直线安稳操控。因为前两种状况现已清晰辨认为直道,此种状况仅仅添加直道辨认的成功率。
第四种直道状况(图5)
与第二种状况相似,对第五种状况的再承认,右转转大弯并通过第五种状况后,再阅历此种状况,可承认无误前方为直道,持续进步小车的加快才干。操控程序由弯道程序切换到直线安稳程序。
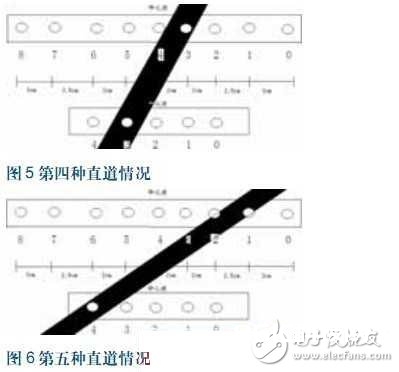
第五种直道状况(图6)
在右转大弯后,出弯时最或许呈现的前后排传感器检测到黑线时的组合状况。适用于右转转 90o弯、180o弯。提早得到出弯信息,舵机向右滚动较小视点,并在此刻采纳加快动作,起到补偿前瞻缺乏的效果。在赛道的s弯呈现时,不满意直道的第二种辨认办法,故不会加快。
(2)直道辨认,程序辅佐承认
进入弯道后,跟着小车的跋涉,会发生振动,致使出弯时不必定满意上述5种状况。为了进步直道的辨认成功率,添加第二种直道判别办法。两者一起起效果,满意第一种后通过最多15ms承认是直道。
程序是循环履行,咱们的程序履行频率是2KHz。选用守时中止(15ms)的办法,对前排中心3个传感器(编号为3、4、5)运用3个计数器别离计数,每次履行程序若是其间一个检测到黑线,相对应的计数器加1。通过核算,15ms内所能计数的最大值为31。咱们设定计数的最大值,若在15ms内到达所要求的计数值,就认为是直道,切换直道程序并将计数器清零;若15ms内没有到达所要求的计数值,计数器清零,从头计数。例如小车为2m/s的速度,小车跋涉3cm。咱们只需判别2~2.5cm内为直道即可。所以设最大计数值为20~25即认为是直道,跳出弯道程序。
当然也能够选用更严厉的办法来判别,只需调整守时中止的时刻和计数值即可。此条件在进入直道后总能满意,所以作为第一种直道判别办法的弥补,确保直道的安稳牢靠辨认。
直线安稳操控战略
小车出弯后,因为舵机的反响不灵敏,智能车会发生振动,随后才干到达安稳,为了尽早减小振动,选用如下办法操控小车出弯后的动作:
在弯道战略中设置标志位,进入直线程序后,辨认标志位,对操控舵机转向的公式采纳批改设置。公式为:q=K1q1+K2q2;其间q为终究送给舵机的操控量,q1为前排光电传感器的回来转角值,q2为后排红外回来转角值。K1、K2别离为前后排传感器的加权份额值。通常状况下K1、K2为1,需求时则改动赋值。
当小车从弯道进入直道并成功辨认出直道后,减小K1的值,因为后排传感器间隔小车的前轮(转向轮)很近,小车中心违背黑线时,不会在后排传感器横向方位发生很大位移(相关于前排传感器),故小车在直线上舵机调整的次数就会显着削减,直线的安稳性会好。一起,依据前后排不同传感器的组合,给出不同的转角战略(在程序中以列表的办法表现),近一步进步直线的安稳操控才干。






