0 导言
KV2000 无感矢量变频器在各行业的运用越来越多,用户常常会用到PID功用。尽管运用阐明书中对PID功用已经有具体的描绘和阐明,但由于技能人员对KV2000共同的PID 功用,比如体系的组成、功用挑选、方向确认、设定值界说、正/ 反作用及PID参数的调整等的了解有所不同,以及各行业的主动操控体系被控目标的千差万别,导致PID的参数也有必要随之改变,以满意体系的功用要求,加之一些新用户对PID功用不熟悉,这都会给运用带来相当大的费事。
作者根据十多年从事以变频器为主的主动化操控规划、运用经历,具体介绍了KV2000 无感矢量变频器内置PID 的丰厚功用,PID 操控的体系组成、参数调试及运转的关键。算是对产品运用手册的弥补,以便广阔用户能在较短时刻内了解并简洁地完结该功用的调试。
1 KV2000无感矢量变频器PID操控器介绍
PID操控器有多种形式,而在实用上大都仍选用份额- 积分-微分(PID)操控器,尤其在温度、压力、流量值操控上运用最为广泛。
PID操控归于闭环操控(Closed-loop Control System),是调整反响量与给定量保持一致的常用的进程操控办法,首要意图是在闭环操控回路中供给体系差错量保持最小以及体系反响速度恰当,防止过激振动或过度愚钝现象的或许。如图1所示,变频器内置的PID操控器经过操控目标的传感器等检测到物理量(如压力,温度等)即反响量,将其与体系给定量进行比较。如有差错,则经过PID调理的作用使差错为零。

1.1 PID首要操控参数
现将PID操控器中首要运用的操控参数做逐项介绍并阐明其用法。
1.1.1 F073 PID设定来历与反响来历的挑选
从图1得知,在操控体系中,有必要要有设定值(目标值),PID 功用模块才会核算反响值与设定值之间的差错量,然后发生PID 的输出成果给操控体系。
F073 便是用来设定PID 功用模块所需求的设定值的来历和反响值的来历,其数值结构由小数点左面的整数部分和小数点右边的小数部分组成。
1)整数部分用来界说PID 操控所需设定值(目标值)的来历;
2)小数部分用来界说PID 操控所需反响值的来历。
表1列出可供挑选的来历设定办法,除了第10号功用选项只能用于设定值来历的设定,其他的选项都是用于设定值以及反响值来历的选用。
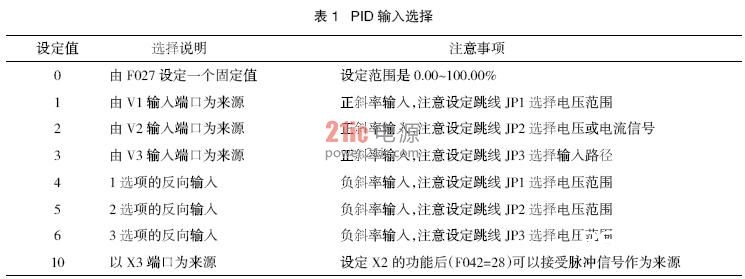
1.1.2 以下阐明重要的注意事项
1)挑选1、2、3 的设定,表明设定值或反响值的来历是模拟信号,并且信号是正向的。所谓的正向信号源是指信号电位越高,代表设定值越高,是正斜率的输入信号源。即当输入在0~+5 V(或0~+10 V或0~20 mA)间改变时,代表设定值或反响值在0~100%改变。
2)挑选4、5、6的设定,与1、2、3 相似,仅仅输入信号是负向的,意指信号电位越高,代表设定值或反响值越低,是负斜率输入信号源。即当输入在0~+5 V(或0~+10 V或0~20 mA)间改变时,代表设定值或反响值在100%~0改变。
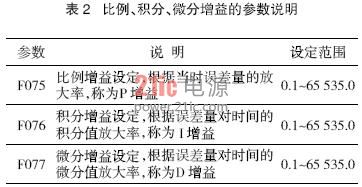
1.2 PID 操控功用的份额、积分、微分增益参数阐明
在PID操控中有三个很重要的操控参数,即份额、积分、微分增益,其阐明如表2所列,这三个参数用来调整PID操控模块的呼应时刻,关于体系全体运作出现出来的反响速度、稳定性和终究寻求的精确度有很大的影响。关于三个增益的作用和设定在《变频技能运用》2007(3)中刊登的《中央空调智能操控体系》一文中有胪陈,在此不再赘述。
2 怎么调整最佳的PID增益
参阅图2,若将I 和D 的增益设成最小值(最小仅能为0.1),那么将可以当作只需P 增益了,由于此刻I和D增益影响不大。

在只需P增益的情况下,就可以很容易地测验设定P增益的值,此刻体系直接输出关于P增益的反响。当决议了P增益后,下一步便是设定I增益了,I增益的设定原则是让体系可以弥补P增益无法批改的的部分即可,若要让体系反响更快一些,那么就要添加I增益的值,以添加积分累计来提高反响速度;
可是要注意别太大了然后形成过度批改的现象。
一般来说,在有回馈的操控体系中,仅设P和I的增益就足以完结操控的需求了,并不特别需求D增益部分;D 增益的意图是为了让体系在时刻呼应上有更好的成果。设定D增益的值时,要仔细调查体系的反响动作,它的作用是在差错的值发生改变的时分,才会有最好的作用,并且它还包含了差错量改变的方向性,所以,D 增益是一个有方向性的向量值。总归,是一个很好的加快、刹车的人物,因而,只需调查体系的改变,由输出作用就能设定出一个恰当的值。
3 其他重要的根本操控项目
要让PID顺畅发动,除了要了解F073的界说和PID 增益参数之外,还有必要了解以下几个参数,并依照要求设定后才可顺畅履行PID的操控功用。
3.1 PID的发动操控
首要,有必要选定一个数字输入端口作为PID 发动信号的输进口,在被选定的数字端口的对应功用挑选参数方位处输入50。例如,选定X1作为PID发动输进口,那么就有必要设定F041=50。当设定好后,X1 若有信号动作时,PID功用就被发动,若X1 的信号中止,那么PID功用就中止。
3.2 PID的输出办法
当了解处理PID的增益和发动办法后,接下来便是PID的输出了。PID的输出办法有两种:一是直接用作变频器的速度指令,二是直接用作模拟输出端口(AM端口)的输出量。两种办法的设定办法见表3。