智能车又称为无人驾驭轿车,归于轮式移动机器人的一种,是一个集环境感知、途径规划、主动驾驭等多功用于一体的归纳体系。智能轿车技能将许多范畴联络在一起,如计算机科学、人工智能、图画处理、模式识别和操控理论等。智能轿车与一般所说的主动驾驭有所不同,它更多指的是使用GPS 和智能公路技能完成的轿车主动驾驭。这种轿车不需求人去驾驭,因为它装有相当于人的“眼睛”、“大脑”和“脚”的电视摄像机、电子计算机和主动操作体系之类的设备,这些置都装有非常杂乱的电脑程序,所以这种轿车能和人相同会“考虑”、“判别”、“行走”,能够主动发动、加快、刹车,能够主动绕过地上障碍物在杂乱多变的情况下,能见机行事,主动挑选最佳计划,指挥轿车正常、顺畅地行进。
电路体系是智能轿车硬件体系的中心,关于本硬件电路体系而言,安稳性是需求优先确保的功用目标,究竟跑完全程才是获得成果的条件。在此基础上,还应当归纳考虑智能轿车的动力性、重心及电路板的紧凑性等其他目标。
电机驱动模块
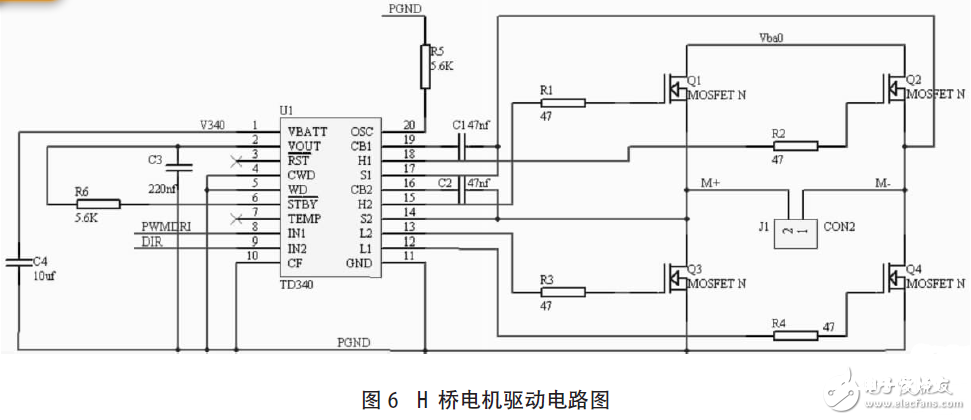
电机驱动模块为智能轿车的行进供给动力,它的功用直接影响到后轮电机的操控功用,包含加快、减速与制动等功用。本文选用MOSFET 驱动芯片加全桥驱动计划,只需合理的挑选MOSFET驱动芯片和功率MOSFET 以确保功用即可。电路图如图6 所示。
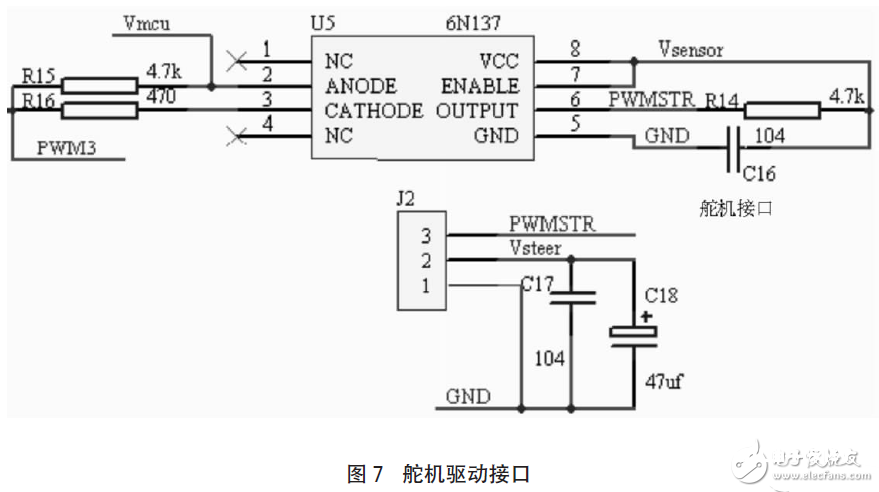
舵机驱动模块
舵机担任智能轿车的转向,舵机模块能否安稳作业直接影响到智能轿车在赛道上高速行进时的安稳性以及转向时的灵敏度和精确度。舵机作业原理为:舵盘角位由单片机宣布的PWM 操控信号的脉宽决议,舵机内部电路经过反应操控调理舵盘角位。因为本身即为视点闭环操控,并且功用较好,故体系中就不用考虑外加舵机闭环。舵机驱动模块电路如图7 所示。舵机驱动模块相同归于功率部分,用6N137光耦进行信号阻隔。
智能车辆是一个触及多范畴的杂乱的归纳体系,要到达有用的意图,还要进一步深化下研讨去,还有许多作业要做。在硬件上还需求处理因摄像头本身精度的差异或其因外部要素丢掉数据导致影响智能车正常运转的问题,增强抗干扰才能;在软件上,还需求进一步优化算法,操控体系是智能轿车的中心内容,针对智能轿车的功用需求,对智能轿车操控体系要害模块进行了研讨,规划的各模块被应用于“飞思卡尔”智能轿车中,文中各图对智能轿车的研讨具有启示效果。